








शास्त्रीय भौतिकी में, गति के चार मूल प्रकार परिभाषित किए गए हैं: रेखीय, घूर्णी, प्रत्यावर्ती और दोलन। जब इन्हें यांत्रिक उपकरणों पर लागू किया जाता है, तो यह प्राकृतिक भौतिक व्यवहार गति को बल में परिवर्तित कर देता है। इस बल या शक्ति का उपयोग किसी प्रकार की आउटपुट गति उत्पन्न करने के लिए किया जाता है, जो उपकरण या मशीनरी को चलाती है। औद्योगिक स्वचालन में, हम विभिन्न प्रकार के उपकरणों का उपयोग करते हैं जो इन विभिन्न प्रकार की गति प्रणालियों का उपयोग करते हैं, आमतौर पर घूर्णी या रेखीय, लेकिन कभी-कभी दोनों का संयोजन भी होता है।
रेखीय गति
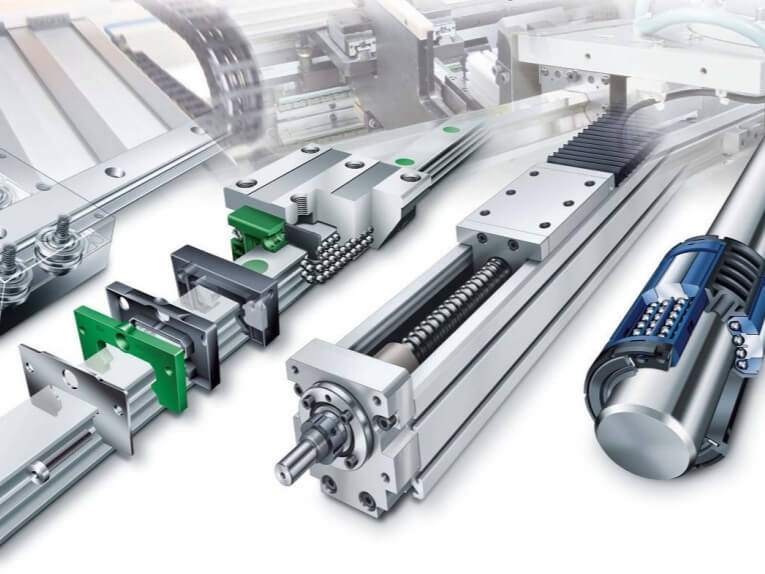
रेखीय गति, गति का सबसे सरल और मूलभूत रूप है, जिसमें किसी वस्तु की स्थिति एक ही दिशा में बदलती है। इसे ऐसे समझें जैसे कोई व्यक्ति सीधी रेखा में चल रहा हो, तैर रहा हो या दौड़ रहा हो, या कोई यांत्रिक वस्तु जैसे कोई वाहन सीधी पटरी पर चल रहा हो। रेखीय गति प्रणाली किसी ऐसे तंत्र पर आधारित होती है जो किसी भार को एक अक्ष के अनुदिश गति प्रदान करता है। वायवीय प्रणाली में, भार को रेखीय मोटर, स्लाइड या एक्चुएटर, या बॉल स्क्रू असेंबली जैसे उपकरणों द्वारा सीधी रेखा में गति प्रदान की जाती है। इस प्रकार की गति प्रणाली का उपयोग आमतौर पर सामग्री प्रबंधन, सीएनसी मशीनिंग, पैकेजिंग, पैलेटाइजिंग और रोबोटिक्स जैसे अनुप्रयोगों में किया जाता है।
लीनियर ड्राइव के प्रकार
विभिन्न ड्राइव प्रौद्योगिकियां रैखिक गति का उपयोग करती हैं, जिनमें से प्रत्येक के अपने-अपने फायदे हैं।
1. रैखिक मोटरये सीधी रेखीय गति उत्पन्न करते हैं। ये तेजी से उच्च गति प्राप्त कर सकते हैं और इन्हें किसी यांत्रिक रूपांतरण की आवश्यकता नहीं होती है। ये पिक-एंड-प्लेस अनुप्रयोगों के लिए बहुत उपयुक्त हैं।
2. रैखिक गाइडरोलर या रेल गाइड जैसे उपकरण कम घर्षण के साथ सुचारू रैखिक गति प्रदान करते हैं। इनका उपयोग अक्सर स्वचालन और मशीन टूल्स में भारी भार को सहारा देने के लिए किया जाता है।
3. बॉल स्क्रूघूर्णी गति को रैखिक गति में परिवर्तित करना। ये अत्यंत सटीक और कुशल होते हैं और रोबोटिक्स तथा सीएनसी मशीनों जैसे अनुप्रयोगों में इनका व्यापक रूप से उपयोग किया जाता है।
4. रैक और पिनियन सिस्टमदांतेदार गियरों का उपयोग करके घूर्णी गति को रेखीय गति में परिवर्तित करके उच्च बल क्षमता और लंबी दूरी तय करने की क्षमता प्रदान करते हैं। इस प्रकार के ड्राइव गैन्ट्री सिस्टम और बड़ी मशीनों में पाए जाते हैं।
रोटरी गति
घूर्णी गति का सबसे बुनियादी रूप पहिया है, जहाँ कोई वस्तु केंद्रीय अक्ष या धुरी बिंदु के चारों ओर किसी भी दिशा में घूमती है। यह गति स्वतः उत्पन्न हो सकती है, जैसे बवंडर या पृथ्वी का घूर्णन, लेकिन स्वचालन प्रणालियों में, यह घूर्णी अभियांत्रिकों, गियर-चालित प्रणालियों या घूर्णी मेजों द्वारा उत्पन्न की जाती है।
एक घूर्णी एक्चुएटर एक त्रिज्या में शक्ति उत्पन्न करता है जो वृत्त का आंशिक कोण या एक पूर्ण, निरंतर चक्कर हो सकता है। घूर्णी गति प्रणालियों का उपयोग करने वाले अनुप्रयोगों में पवन, जल या भाप से ऊर्जा उत्पन्न करने वाले टरबाइन, मशीन टूल स्पिंडल, ड्रिलिंग या ग्राइंडिंग उपकरण, रोबोट जोड़ और इंडेक्सिंग टेबल शामिल हैं।
रोटरी ड्राइव के प्रकार
घूर्णनशील उपकरणों को उनके शक्ति या ऊर्जा के स्रोत के आधार पर वर्गीकृत किया जाता है, जिनमें मैनुअल, इलेक्ट्रिक या द्रव-आधारित (हाइड्रोलिक या न्यूमेटिक) शामिल हैं।
1. मैनुअल ड्राइवएक गियर प्रणाली की मदद से घूर्णी गति उत्पन्न की जाती है, जिसमें आमतौर पर हाथ से संचालित एक पहिया होता है जो गियरिंग के माध्यम से घूर्णी ऊर्जा को क्रियाशील तत्व तक पहुंचाता है। यांत्रिक बल भारी भार को स्थानांतरित करने के लिए आवश्यक प्रयास की मात्रा को कम करता है।
2. इलेक्ट्रिक रोटरी ड्राइवये आम तौर पर गियरों की एक प्रणाली को नियंत्रित करने वाली मोटर पर चलते हैं। ये आम तौर पर उत्क्रमणीय होते हैं और कोणीय घूर्णन या दोलन उत्पन्न कर सकते हैं। एक विद्युत नियंत्रक मोटर में इनपुट करंट को नियंत्रित करता है, जिससे त्वरण और वेग को बदला जा सकता है।
3. द्रव-आधारित घूर्णी ड्राइवगति उत्पन्न करने के लिए दबावयुक्त हवा या तरल का उपयोग किया जाता है। ऐसा करने के कई तरीके हैं, जिनमें रैक और पिनियन गियरिंग, वेन या डायाफ्राम पर दबाव, या पिस्टन और घूर्णनशील युग्मन प्रणाली जिसे स्कॉच योक कहा जाता है, का उपयोग शामिल है।
संयोजन गति प्रणालियाँ
अधिक जटिल कार्यों के लिए विभिन्न प्रकार की गतियों के संयोजन से एक प्रणाली बनाई जाती है, जिनमें सबसे आम रैखिक और घूर्णी गतियाँ होती हैं। ये गतियाँ पिक-एंड-प्लेस कार्यों और रोबोटिक्स जैसे अनुप्रयोगों में पाई जाती हैं, जहाँ इनका उपयोग विभिन्न प्रकार के रोबोटों और कुछ रोबोटिक भुजाओं के लिए किया जाता है। इसके अलावा, बहु-अक्षीय गति नियंत्रण और जटिल इलेक्ट्रॉनिक प्रोग्रामिंग के समाधानों में भी तकनीकी प्रगति देखने को मिलती है।
संयुक्त गति ड्राइव
संयुक्त गति चालित प्रणालियों के साथ सटीक गति प्राप्त करने के लिए, मुख्य समाधान गियर, बेल्ट ड्राइव और लीड स्क्रू हैं। प्रत्येक समाधान की अपनी-अपनी खूबियाँ और कमियाँ हैं, जिनमें दोहराव, स्थिति निर्धारण गति, सटीकता और लागत शामिल हैं।
1. गियरगियर यांत्रिक उपकरण हैं जो आपस में जुड़े दांतों के माध्यम से टॉर्क संचारित करते हैं। गियर तंत्र में दांत दूसरे गियर या ड्राइव के समान दांतेदार भागों के साथ मिलकर घूर्णी बल उत्पन्न करते हैं। गियर आमतौर पर गोलाकार होते हैं, जिनकी परिधि पर दांत होते हैं, लेकिन गियर व्हील के आंतरिक व्यास पर भी दांत लगाना संभव है। इस तरह के डिज़ाइन आमतौर पर स्थान और वजन की दृष्टि से महत्वपूर्ण अनुप्रयोगों में उपयोग किए जाते हैं और उच्च स्तर का टॉर्क और गति नियंत्रण प्रदान करते हैं। दो या दो से अधिक आपस में जुड़े गियर एक क्रम में गियर ट्रेन के रूप में भी काम कर सकते हैं, जो आमतौर पर मोटर या इंजन द्वारा संचालित होते हैं।
2. बेल्ट ड्राइवबेल्ट ड्राइव में आमतौर पर एक लचीली, गोलाकार पट्टी या बेल्ट होती है जो दो पुली को जोड़ती है। ये मोटर द्वारा संचालित होती हैं और इनकी चक्रीय गति एक स्थान से दूसरे स्थान तक घूर्णी शक्ति का संचरण करती है। ये लंबी दूरी तय करने वाले अनुप्रयोगों के लिए बहुत उपयोगी होती हैं, क्योंकि ये गियर ड्राइव की तुलना में हल्की, शांत, सस्ती और संचालन में अधिक कुशल होती हैं। बेल्ट ड्राइव का सबसे आम उपयोग कन्वेयर सिस्टम और इंजनों के लिए कैम बेल्ट में होता है।
3. बॉल स्क्रू की तरह,लीड स्क्रू या पावर स्क्रू, स्क्रू या नट की घूर्णी गति को रेखीय गति में परिवर्तित करते हैं। लीड स्क्रू और नट गति को स्थानांतरित करने के लिए हेलिकल थ्रेड डिज़ाइन का उपयोग करते हैं, इसलिए इन्हें ट्रांसलेशन स्क्रू भी कहा जाता है। ये विभिन्न आकारों और मानों में उपलब्ध होते हैं, जिससे आप यह निर्धारित कर सकते हैं कि स्क्रू के एक चक्कर में कितनी गति प्रदान की जाएगी। यह इन्हें डिस्क रीडर हेड जैसे उच्च परिशुद्धता और गति की आवश्यकता वाले ड्राइव या बेंच वाइस जैसे कम गति और उच्च टॉर्क की आवश्यकता वाले ड्राइव के लिए उपयुक्त बनाता है। लीड स्क्रू उच्च भार स्थानांतरण या सटीक गति की आवश्यकता वाले अनुप्रयोगों के लिए भी अच्छे होते हैं और आमतौर पर हॉबी मशीनरी और रोबोटिक्स में उपयोग किए जाते हैं।
आपको किस प्रकार की गति का चयन करना चाहिए?
आप किस प्रकार की गति प्रणाली का उपयोग करते हैं, यह काफी हद तक आपके अनुप्रयोग और उसके कार्य वातावरण पर निर्भर करता है। आपके पास कितनी जगह है, या कितनी दूरी तय करनी है? विचार करने योग्य अन्य कारकों में यह भी शामिल है कि आपको कितनी सटीकता और गति की आवश्यकता है और किसी कार्य को पूरा करने के लिए आपको कितने बल की आवश्यकता है। रैखिक, घूर्णी या संयोजन गति प्रणालियों का चयन करने के लिए कुछ जटिल गणनाओं की आवश्यकता हो सकती है। यदि आपको कोई संदेह है या सहायता की आवश्यकता है, तो FUYU Motion में हमारे विशेषज्ञों से संपर्क करने में संकोच न करें।
पोस्ट करने का समय: 23 सितंबर 2025