







-
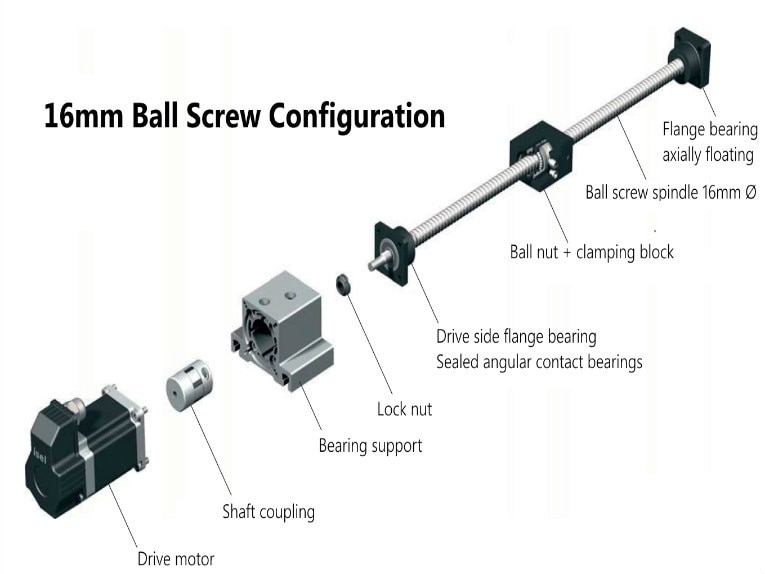
المحرك الخطي مقابل برغي الكرة
تطبيق فعال من حيث التكلفة لتصميمك الخاص. على الرغم من استخدام المحركات الخطية عديمة الحديد في تطبيقات أشباه الموصلات والإلكترونيات لأكثر من عقد من الزمان، إلا أن العديد من المصممين ومصنعي المعدات الأصلية ما زالوا ينظرون إليها على أنها منتجات متخصصة. لكن النظرة السائدة للمحركات الخطية كحل مكلف لـ...اقرأ المزيد -
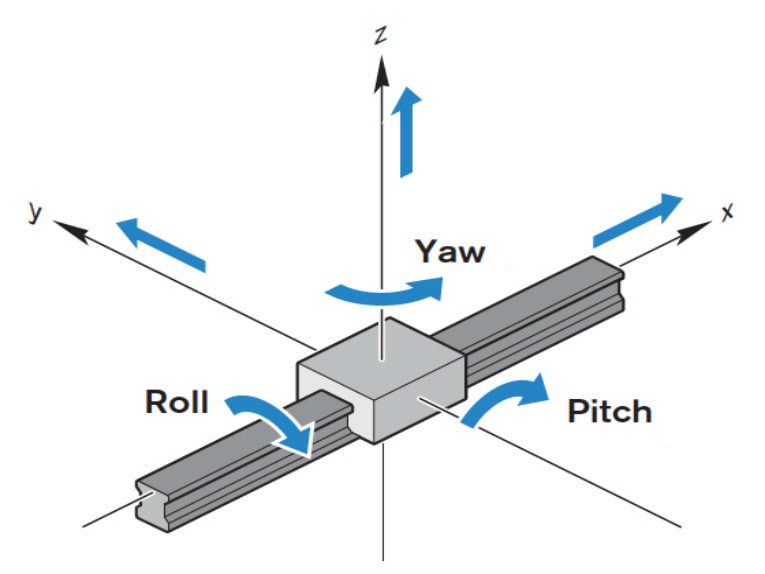
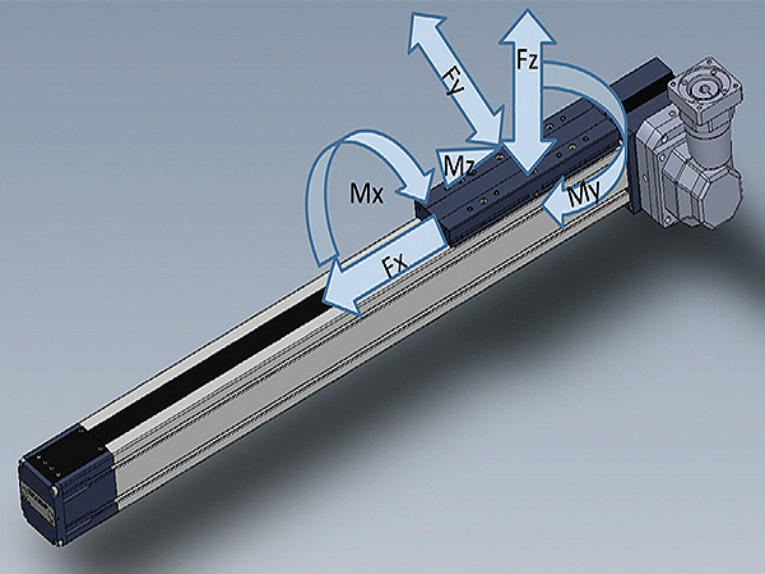
أساسيات الحركة: كيفية تعريف الدوران، والميل، والانعراج للأنظمة الخطية
يشمل ذلك الروبوتات الكارتيزية، وأنظمة البوابات، وطاولات XY. تتعرض الموجهات والأنظمة الخطية عادةً لقوى خطية ناتجة عن أحمال رأسية وعلوية وجانبية، بالإضافة إلى قوى دورانية ناتجة عن أحمال معلقة. تُعرَّف القوى الدورانية - والتي تُعرف أيضًا بقوى العزم - عادةً على أنها...اقرأ المزيد -

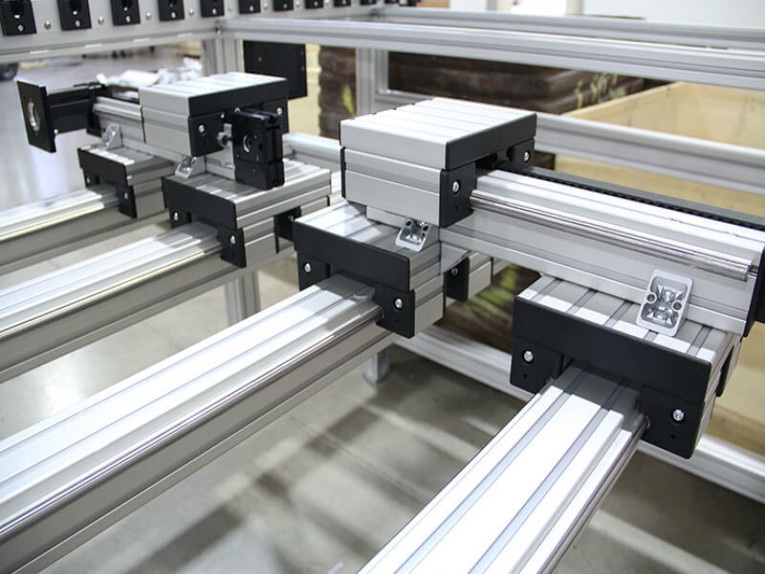
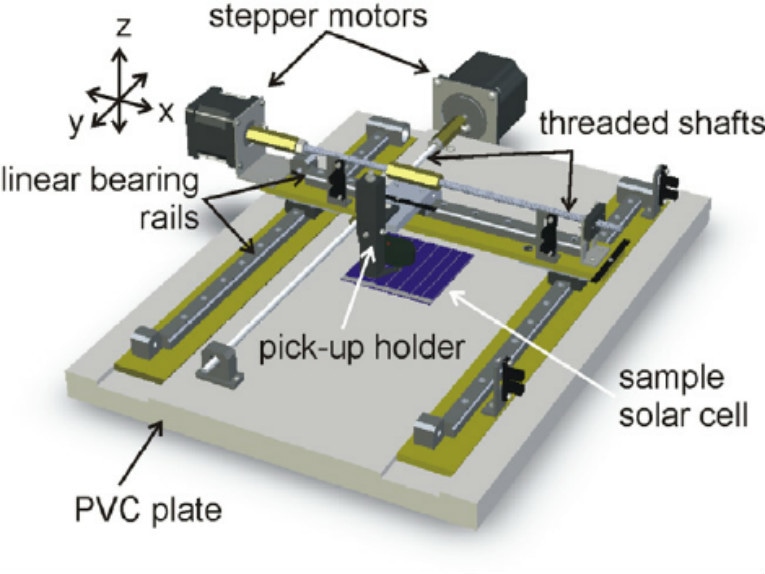
منصات/طاولات تحديد المواقع الخطية
تُستخدم منصات وطاولات تحديد المواقع في أنظمة التحكم بالحركة لتثبيت قطعة العمل و/أو تحديد موضعها لعملية معينة. غالبًا ما تكون هذه المنصات أو الطاولات، سواء كانت خطية أو دوارة، أنظمة حركة فرعية متكاملة. أي أنها أنظمة حركة بحد ذاتها...اقرأ المزيد -
دليل اختيار الأنظمة الخطية
أنظمة تعمل بالسيور، وأنظمة تعمل ببراغي كروية، وأنظمة تعمل بالتروس والجريدة المسننة، وأنظمة تعمل بمحركات خطية، وأنظمة تعمل بالهواء المضغوط. لقد ولّى زمن اضطرار مصممي وبناة الآلات للاختيار بين بناء نظامهم الخطي الخاص من الصفر أو الاكتفاء بمجموعة محدودة من الأنظمة الجاهزة التي...اقرأ المزيد -
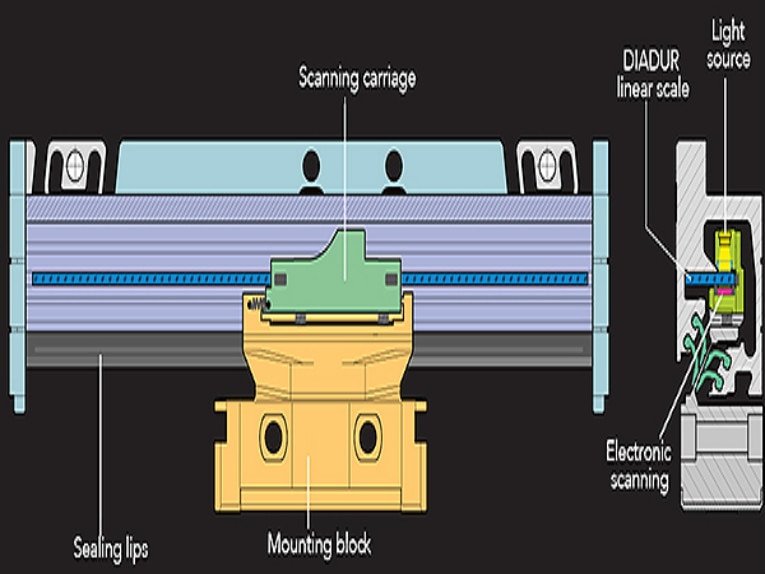
تعمل أجهزة التشفير الخطية على تحسين الدقة
تعمل المشفرات الخطية على تحسين الدقة من خلال تصحيح الأخطاء في المراحل اللاحقة للوصلات الميكانيكية. وتتتبع هذه المشفرات موضع المحور دون الحاجة إلى عناصر ميكانيكية وسيطة. بل إنها تقيس أخطاء النقل من الوصلات الميكانيكية (مثل الأجهزة الميكانيكية الدوارة إلى الخطية)، مما يساعد على التحكم...اقرأ المزيد -
كيفية الحصول على حركة خطية قابلة للتنبؤ وموثوقة
الدقة والتكرارية، السعة، طول الحركة، الاستخدام، البيئة المحيطة، التوقيت، الاتجاه، المعدلات. إليك بعض النصائح حول كيفية تحديد حجم مشغل يعمل بمحرك خطي بشكل صحيح باستخدام الاختصار ACTUATOR - وهو اختصار للدقة، السعة، طول الحركة، الاستخدام، البيئة المحيطة،...اقرأ المزيد -

منصة خطية أفقية ورأسية، منصة تحديد المواقع على المحور Z
تستطيع منصات تحديد المواقع اليوم تلبية متطلبات الإنتاج الدقيقة والمعقدة. ويعود ذلك إلى أن التكامل المخصص وأحدث تقنيات برمجة الحركة تُسهم في تحقيق دقة وتزامن فائقين لهذه المنصات. علاوة على ذلك، تُساعد التطورات في الأجزاء الميكانيكية والمحركات الشركات المصنعة للمعدات الأصلية على التخطيط لـ...اقرأ المزيد -
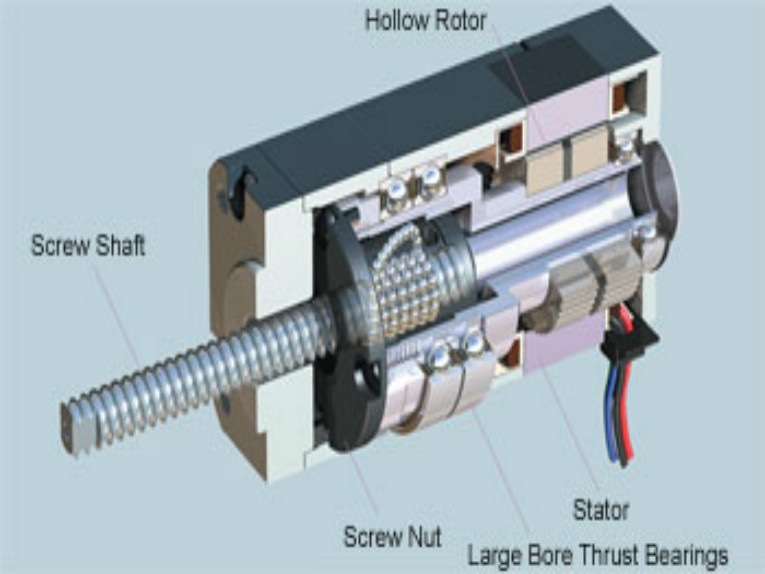
كيفية تقليص حجم المحرك الخطي
حلول لمنصات XY ومراكز التصنيع الصغيرة، مثل طابعات ثلاثية الأبعاد. تأتي المحركات الخطية بأحجام متنوعة، ولكن خلال السنوات القليلة الماضية، ركز المصنعون بشكل متزايد على الأحجام الأصغر. ولكن مهما كان حجم المحرك صغيرًا، فإن إضافة محرك كهربائي قد تجعله...اقرأ المزيد -
تحديث اتجاهات الحركة: مراحل تحديد المواقع تقود إلى تصميم عملي
شهدت أنظمة التحكم والإلكترونيات أهم التطورات في مجال الحركة خلال العقد الماضي. باتت منصات تحديد المواقع اليوم قادرة على تلبية متطلبات إخراج محددة ودقيقة. ويعود ذلك إلى أن التكامل المخصص وأحدث تقنيات برمجة الحركة تُسهم في تحقيق دقة فائقة لهذه المنصات.اقرأ المزيد -

كيفية اختيار دقة الدليل الخطي
اعتبارات التركيب: كتلة واحدة على سكة واحدة، كتل متعددة على سكة واحدة، محامل متعددة على سكك متعددة. عند اختيار دليل خطي دوار، هناك عدة معايير يجب تحديدها، بما في ذلك الحجم والتحميل المسبق والدقة. وعلى الرغم من أن مصطلح "الدقة" ...اقرأ المزيد -
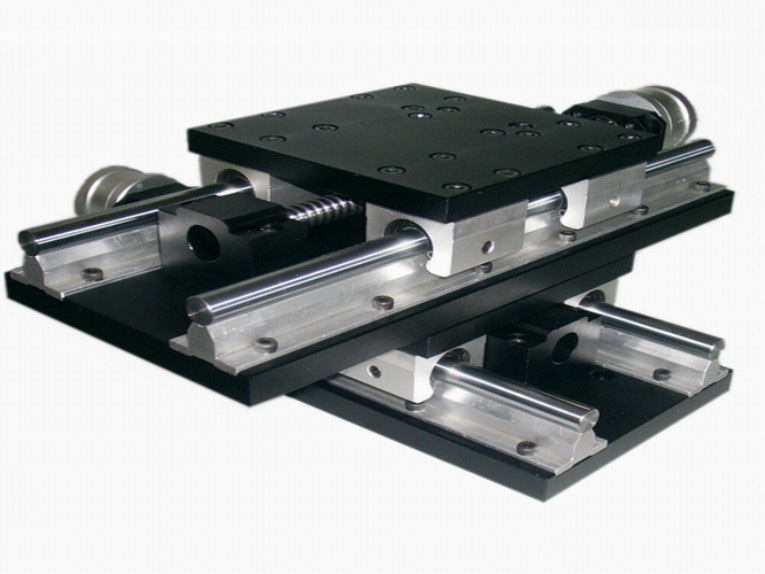
جداول XY: كيف تختلف عن أنظمة الإحداثيات الديكارتية وأنظمة البوابات؟
يستخدم تصميم طاولة XY الشائع منزلقات بكرات متقاطعة ومحرك لولبي كروي لتحقيق دقة عالية جدًا في الحركة وتحديد المواقع. توجد طرق عديدة لبناء أنظمة خطية للحركة في الاتجاهات X وY و/أو Z، والمعروفة أيضًا بالإحداثيات الديكارتية. المصطلحات التي نستخدمها عادةً للإشارة إلى هذه الأنظمة...اقرأ المزيد -

المحركات الخطية عالية السرعة: ما الذي يؤهلها لتكون عالية السرعة؟
تعتمد السرعة بشكل أساسي على آلية التشغيل. ومثل العديد من المصطلحات المستخدمة في صناعة الحركة الخطية - مثل "شديد التحمل" و"مصغر" و"مقاوم للتآكل" على سبيل المثال لا الحصر - لا يوجد معيار صناعي يحدد ما يُعتبر مشغلًا خطيًا "عالي السرعة". ومع ذلك، هناك...اقرأ المزيد
