








Klassisessa fysiikassa neljä perusliiketyyppiä määritellään lineaariseksi, pyöriväksi, edestakaiseksi ja värähteleväksi. Kun näitä sovelletaan mekaanisiin laitteisiin, tämä luonnollinen fysikaalinen käyttäytyminen muuttaa liikkeen voimaksi. Tätä voimaa tai tehoa käytetään sitten jonkinlaisen lähtöliikkeen luomiseen, joka ohjaa laitteita tai koneita. Teollisuusautomaatiossa käytämme monenlaisia laitteita, jotka hyödyntävät näitä erityyppisiä liikejärjestelmiä, yleensä joko pyöriviä tai lineaarisia, mutta joskus molempien yhdistelmää.
Lineaarinen liike
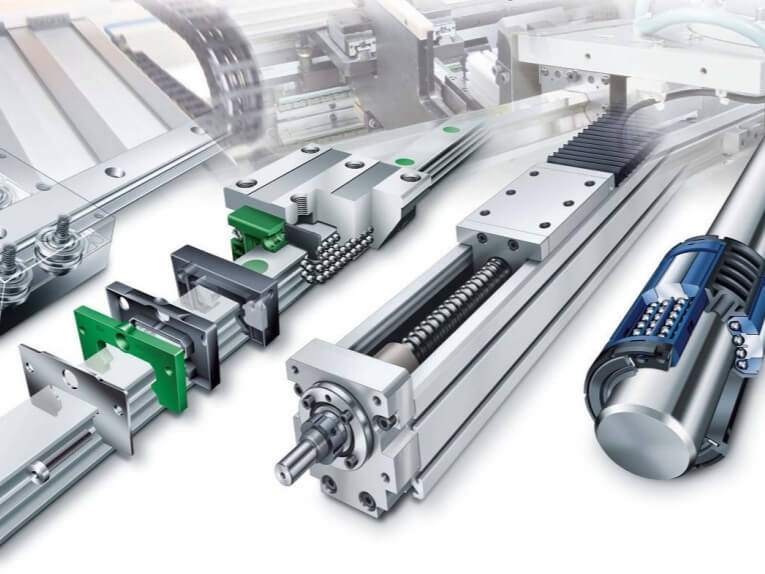
Lineaarinen liike on yksinkertaisin ja perustavanlaatuisin liikkumismuoto, jolle on ominaista asennon muuttaminen yhteen suuntaan. Kuvittele se henkilönä, joka kävelee, ui tai juoksee suorassa linjassa, tai mekaanisena esineenä, kuten ajoneuvona, joka kulkee suoralla radalla. Lineaarinen liikejärjestelmä perustuu jonkinlaiseen mekanismiin, joka liikuttaa kuormaa yhtä akselia pitkin. Pneumatiikassa kuormia liikutetaan suorassa linjassa laitteiden, kuten lineaarimoottoreiden, liukujen tai toimilaitteiden tai kuularuuvikokoonpanojen, avulla. Tämän tyyppistä liikejärjestelmää löytyy yleisimmin sovelluksista, kuten materiaalinkäsittelystä, CNC-koneistuksesta, pakkaamisesta, lavaamisesta ja robotiikasta.
Lineaarisen käytön tyypit
Useat käyttötekniikat hyödyntävät lineaarista liikettä, jokaisella on omat etunsa
1. Lineaarimoottoritluovat suoran lineaarisen liikkeen. Ne voivat kiihtyä nopeasti suuriin nopeuksiin eivätkä vaadi mekaanisia muunnoksia. Ne sopivat erittäin hyvin poiminta- ja sijoitussovelluksiin.
2. Lineaariohjaimetkuten rulla- tai kisko-ohjaimet, tarjoavat vähäkitkaisen ja tasaisen lineaarisen liikkeen. Niitä käytetään usein automaatiossa ja työstökoneissa raskaiden kuormien tukemiseen.
3. Kuularuuvitmuuntavat pyörimisliikkeet lineaariliikkeeksi. Ne ovat erittäin tarkkoja ja tehokkaita, ja niitä käytetään paljon robotiikassa ja sovelluksissa, kuten CNC-koneissa.
4. Hammastanko- ja hammaspyöräjärjestelmättarjoavat suuren voimakapasiteetin ja pitkät liikematkat käyttämällä hammaspyöriä pyörimisliikkeen muuntamiseksi lineaariliikkeeksi. Tämän tyyppistä käyttölaitetta löytyy portaalijärjestelmistä ja suurista koneista.
Pyörivä liike
Pyörivän liikkeen perustavanlaatuisin muoto on pyörä, jossa jokin pyörii tai kiertyy jompaankumpaan suuntaan keskiakselin tai nivelpisteen ympäri. Liike voi olla itsestään syntyvää, kuten tornado tai maan pyöriminen, mutta automaatiojärjestelmissä sen luovat pyörivät toimilaitteet, hammaspyöräkäyttöiset järjestelmät tai pyöröpöydät.
Pyörivä toimilaite tuottaa tehoa säteellä, joka voi olla ympyrän osittainen kulma tai täydellinen, jatkuva kierros. Pyörivää liikettä käyttäviä sovelluksia ovat esimerkiksi turbiinit, jotka tuottavat energiaa tuulesta, vedestä tai höyrystä, työstökoneiden karat, poraus- tai hiontatyökalut, robottien nivelet ja indeksointipöydät.
Pyörivän käyttölaitteen tyypit
Pyörivät laitteet luokitellaan niiden voimanlähteen tai energian mukaan, mukaan lukien manuaaliset, sähköiset tai nestepohjaiset (joko hydrauliset tai pneumaattiset).
1. Manuaaliset käyttölaitteetLuo pyörimisliike vaihdejärjestelmällä, tyypillisesti käsikäyttöisellä pyörällä, joka välittää pyörimisenergian vaihdelaatikon kautta käyttöelementtiin. Mekaaninen vääntömomentti vähentää suuren kuorman siirtämiseen tarvittavaa voimaa.
2. Sähkökäyttöiset pyörivät käyttölaitteetyleensä toimivat moottorilla, joka ohjaa vaihdejärjestelmää. Ne ovat yleensä käännettäviä ja voivat tuottaa kulmakiertoa tai värähtelyä. Sähköinen ohjain säätelee moottorin tulovirtaa, joten se voi muuttaa kiihtyvyyttä ja nopeutta.
3. Nesteeseen perustuvat pyörivät käyttölaitteetkäyttää paineistettua ilmaa tai nestettä liikkeen aikaansaamiseksi. Tähän on monia tapoja, kuten hammastankovaihteisto, paine siiven tai kalvon päällä tai männän ja pyörivän kytkentäjärjestelmän, jota kutsutaan skotti-yökoksi, käyttö.
Yhdistelmäliikejärjestelmät
Monimutkaisemmissa tehtävissä järjestelmä luodaan yhdistämällä erilaisia liiketyyppejä, yleisimmin lineaarisia ja pyöriviä. Näitä löytyy sovelluksista, kuten poiminta-ja-sijoitustoiminnoista ja robotiikasta, joissa niitä käytetään erityyppisissä roboteissa ja joissakin robottikäsivarsissa. Näet myös teknologisia edistysaskeleita moniakselisen liikkeenohjauksen ja monimutkaisen elektronisen ohjelmoinnin ratkaisuissa.
Yhdistetyt liikemoottorit
Tarkan liikkeen saavuttamiseksi yhdistetyillä liikeohjaimilla tärkeimmät ratkaisut ovat hammaspyörät, hihnakäytöt ja johtoruuvit. Jokaisella ratkaisulla on omat vahvuutensa ja heikkoutensa, mukaan lukien toistettavuus, paikannusnopeus, tarkkuus ja kustannukset.
1. Vaihteetovat mekaanisia laitteita, jotka välittävät vääntömomenttia yhdistämällä hampaita. Vaihdemekanismin hampaat kytkeytyvät toisen hammaspyörän tai käyttölaitteen yhteensopivasti hammastettuihin osiin luodakseen pyörimisvoiman. Vaihteet ovat yleensä pyöreitä, hammastetuilla kehillä, mutta hampaita voidaan sijoittaa myös hammaspyörän sisähalkaisijalle. Tällaisia rakenteita käytetään yleensä tila- ja painokriittisissä sovelluksissa, ja ne tarjoavat korkean vääntömomentin ja nopeuden säätöasteen. Kaksi tai useampia lomittuneita vaihteita voi myös toimia peräkkäin hammaspyörästönä pyörimisliikkeen välittämiseksi, tyypillisesti moottorin tai polttoaineen voimalla.
2. Hihnakäyttöisetkoostuvat yleensä joustavasta, pyöreästä nauhasta tai hihnasta, joka yhdistää kaksi hihnapyörää. Niitä käyttää moottori, ja niiden syklinen liike siirtää pyörimisvoimaa paikasta toiseen. Ne ovat erittäin hyödyllisiä sovelluksissa, joissa on kuljettava pitkiä matkoja, koska ne ovat kevyempiä, hiljaisempia, halvempia ja tehokkaampia käyttää kuin vaihteet. Yleisin hihnakäyttöjen sovellus on kuljetinjärjestelmät ja moottoreiden jakohihnat.
3. Kuin kuularuuvi,Johtoruuvit tai voimaruuvit muuttavat ruuvin tai mutterin pyörimisliikkeen lineaariseksi liikkeeksi. Johtoruuveissa ja muttereissa käytetään kierrekierrettä liikkeen siirtämiseen, joten niitä kutsutaan usein myös siirtoruuveiksi. Niitä on saatavana monenlaisina kokoina ja arvoina, joten voit määrittää, kuinka paljon liikettä ruuvin yksi pyörähdys tuottaa. Tämä tekee niistä käyttökelpoisia sekä suurta tarkkuutta ja nopeutta vaativissa käyttölaitteissa, kuten levynlukupäässä, että sellaisissa, jotka vaativat alhaista nopeutta ja suurta vääntömomenttia, kuten ruuvipenkissä. Johtoruuvit sopivat myös hyvin sovelluksiin, jotka vaativat suurta kuormansiirtoa tai tarkkaa liikettä, ja niitä käytetään yleisesti harrastekoneissa ja robotiikassa.
Minkä tyyppinen liikkuvuus sinun pitäisi valita?
Käyttämäsi liikejärjestelmän tyyppi riippuu pitkälti sovelluksestasi ja sen työympäristöstä. Kuinka paljon tilaa sinulla on tai kuinka suuri etäisyys ylitettävä? Muita huomioon otettavia tekijöitä ovat tarvittava tarkkuus ja nopeus sekä tehtävän suorittamiseen tarvittava voima. Lineaarisen, pyörivän tai yhdistelmäliikejärjestelmän valitseminen voi vaatia monimutkaisia laskelmia. Jos olet epävarma tai tarvitset apua, älä epäröi ottaa yhteyttä asiantuntijoihimme täällä FUYU Motionilla.
Julkaisun aika: 23. syyskuuta 2025