







-
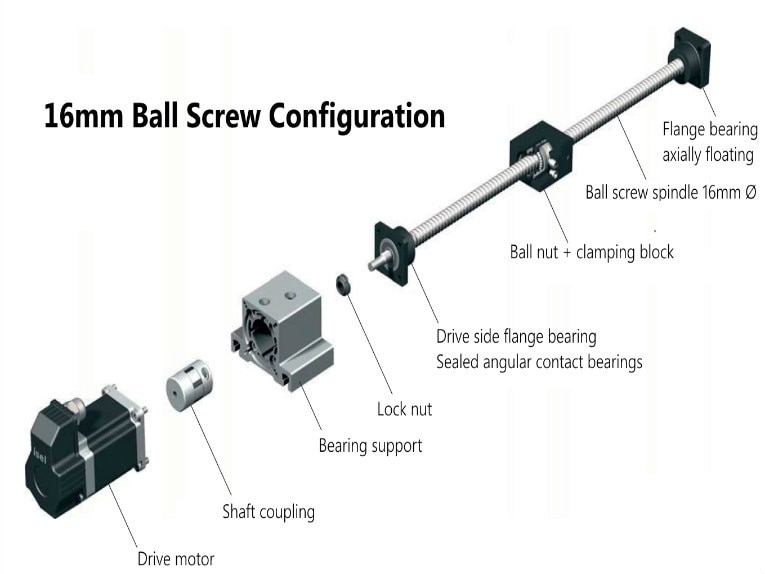
Motore lineare vs. vite a sfere
L'applicazione conveniente per il tuo progetto. Sebbene i motori lineari ironless siano utilizzati in applicazioni elettroniche e nei semiconduttori da oltre un decennio, sono ancora considerati da molti progettisti e OEM come prodotti di "nicchia". Tuttavia, la percezione dei motori lineari come una soluzione costosa per...Per saperne di più -
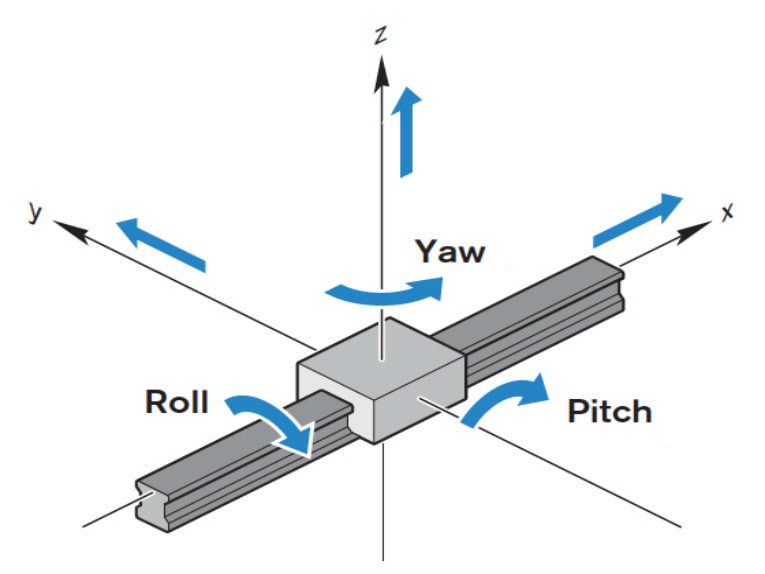
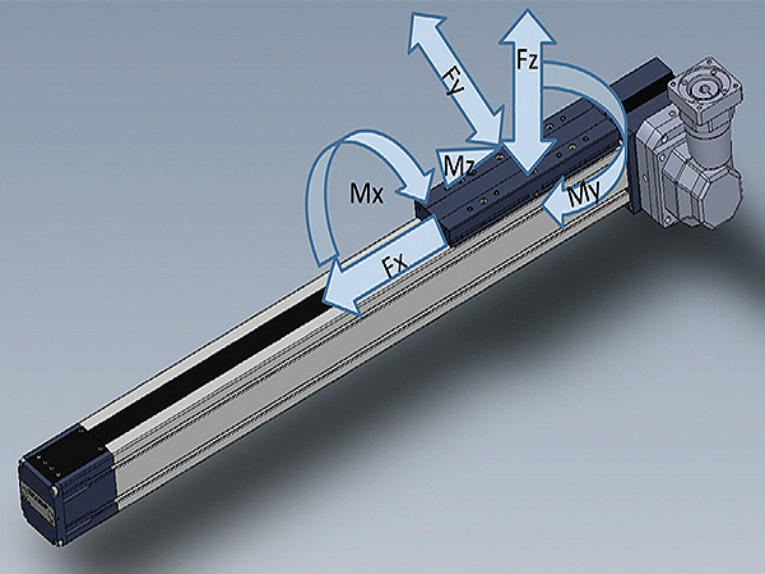
Nozioni di base sul movimento: come definire rollio, beccheggio e imbardata per i sistemi lineari
Inclusi robot cartesiani, sistemi a portale e tavole XY. Le guide e i sistemi lineari sono tipicamente soggetti sia a forze lineari dovute a carichi verso il basso, verso l'alto e laterali, sia a forze rotazionali dovute a carichi a sbalzo. Le forze rotazionali, note anche come forze di momento, sono tipicamente definite come...Per saperne di più -

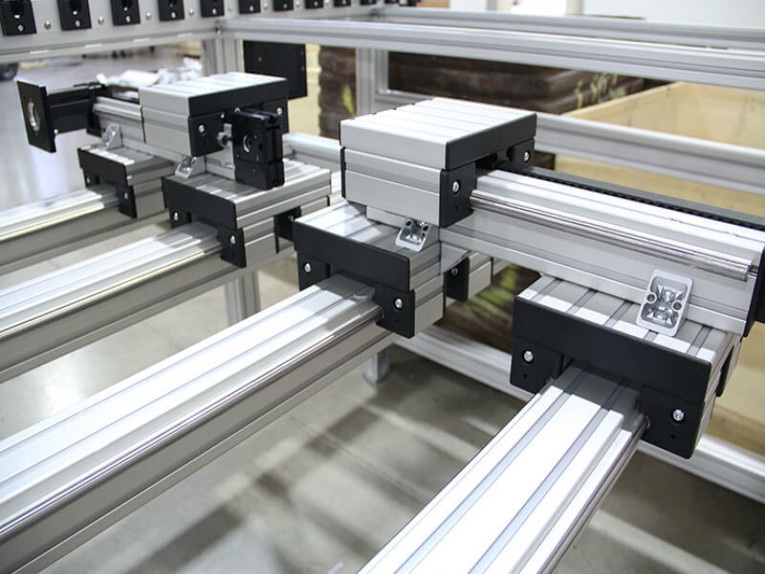
Fasi/tabelle di posizionamento lineare
Robot cartesiani per sistemi a portale. Tavole e stadi di posizionamento vengono utilizzati nei sistemi di controllo del movimento per trattenere un pezzo in lavorazione e/o posizionarlo per determinate operazioni. Le tavole e gli stadi, lineari o rotanti, sono spesso sottosistemi di movimento completi. In altre parole, sono essi stessi sistemi di movimento...Per saperne di più -
Una guida alla selezione per i sistemi lineari
Sistemi a cinghia, a vite a sfere, a cremagliera e pignone, a motore lineare, a comando pneumatico. Sono finiti i giorni in cui progettisti e costruttori di macchine dovevano scegliere tra costruire il proprio sistema lineare da zero o accontentarsi di una gamma limitata di sistemi preassemblati che, in...Per saperne di più -
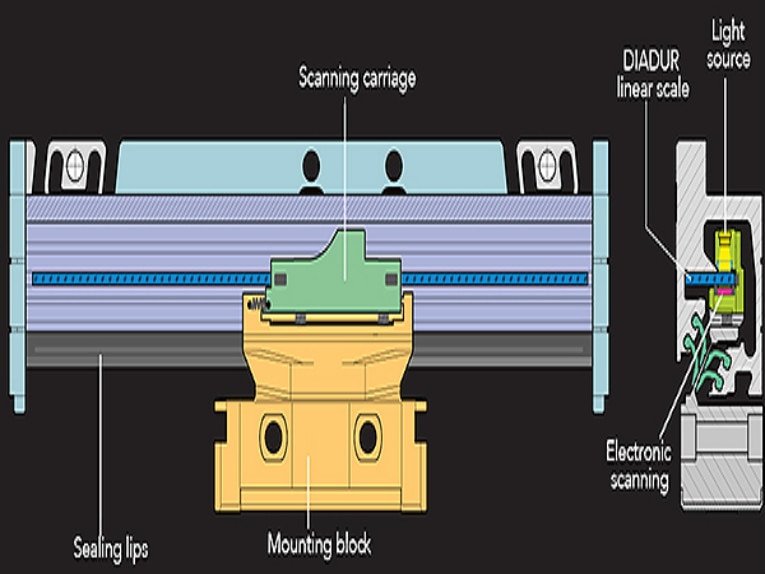
Gli encoder lineari migliorano la precisione
Gli encoder lineari aumentano la precisione correggendo gli errori a valle dei collegamenti meccanici. Gli encoder lineari tracciano la posizione degli assi senza elementi meccanici intermedi. Gli encoder misurano persino gli errori di trasferimento dai collegamenti meccanici (come i dispositivi meccanici rotativi-lineari), il che aiuta a controllare...Per saperne di più -
Come ottenere un movimento lineare prevedibile e affidabile
Precisione e ripetibilità, capacità, lunghezza della corsa, utilizzo, ambiente, temporizzazione, orientamento, velocità. Ecco alcuni suggerimenti su come specificare e dimensionare correttamente un attuatore azionato da motore lineare utilizzando la sigla ACTUATOR, abbreviazione di precision, capacity, travel length, usage, ambient environment,...Per saperne di più -

Posizionamento dell'asse Z della piattaforma lineare orizzontale e verticale
Oggi, le piattaforme di posizionamento possono soddisfare requisiti di output specifici e impegnativi. Questo perché l'integrazione personalizzata e le più recenti tecnologie di programmazione del movimento consentono ora alle piattaforme di raggiungere un'accuratezza e una sincronizzazione incredibili. Inoltre, i progressi nei componenti meccanici e nei motori stanno aiutando gli OEM a pianificare...Per saperne di più -
Come ridurre le dimensioni di un attuatore lineare
Soluzione per tavole XY e piccoli centri di lavoro, come le stampanti 3D. Gli attuatori lineari sono disponibili in un'ampia gamma di dimensioni, ma negli ultimi anni i produttori hanno puntato sempre più su ingombri più compatti. Tuttavia, indipendentemente dalle dimensioni dell'attuatore, l'aggiunta di un motore può rendere...Per saperne di più -
Aggiornamento sulle tendenze del movimento: le fasi di posizionamento guidano la progettazione pragmatica
I principali progressi nel campo del movimento nell'ultimo decennio hanno riguardato i sistemi di controllo e l'elettronica. Oggi, gli stadi di posizionamento possono soddisfare requisiti di output specifici e impegnativi. Questo perché l'integrazione personalizzata e le più recenti tecnologie di programmazione del movimento consentono ora agli stadi di raggiungere un'incredibile precisione...Per saperne di più -

Come scegliere la precisione della guida lineare
Considerazioni sul montaggio, Singolo carrello su una singola rotaia, Più carrelli su una singola rotaia, Più cuscinetti su più rotaie. Quando si sceglie una guida lineare a ricircolo, è necessario specificare diversi criteri, tra cui dimensioni, precarico e precisione. E sebbene il termine "precisione"...Per saperne di più -
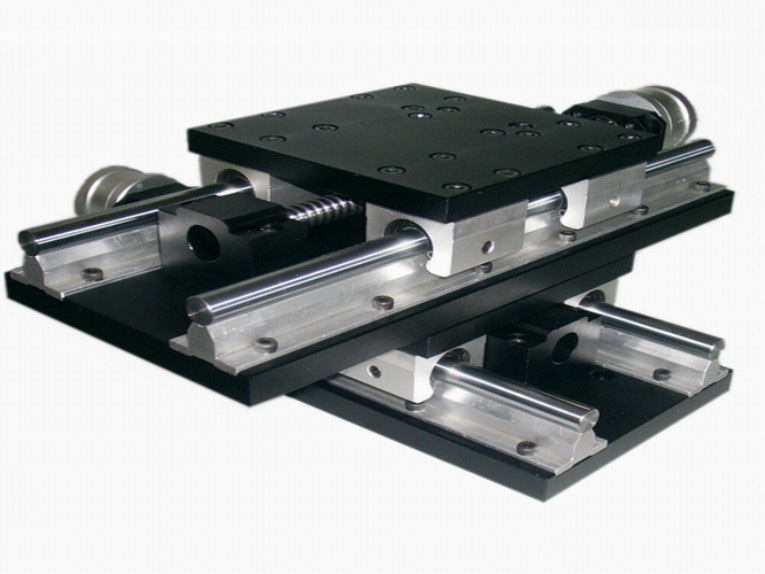
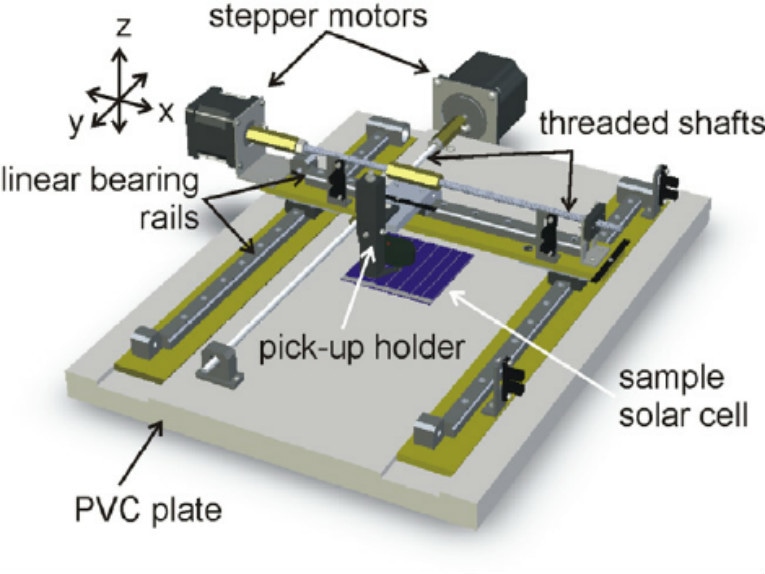
Tabelle XY: in cosa differiscono dai sistemi cartesiani e gantry?
Un comune progetto di tavola XY utilizza guide a rulli incrociati e una trasmissione a vite a ricircolo di sfere per garantire precisioni di spostamento e posizionamento molto elevate. Esistono molti modi per costruire sistemi lineari per il movimento nelle direzioni X, Y e/o Z, note anche come coordinate cartesiane. I termini che generalmente utilizziamo per riferirci a questi...Per saperne di più -

Attuatori lineari ad alta velocità: cosa li qualifica come ad alta velocità?
La velocità dipende principalmente dal meccanismo di azionamento. Come molti termini utilizzati nel settore della movimentazione lineare – "per impieghi gravosi", "miniaturizzato" e "resistente alla corrosione", per citarne alcuni – non esiste uno standard di settore che specifichi cosa costituisca un attuatore lineare "ad alta velocità". Ciononostante, esistono così tanti...Per saperne di più
