







-
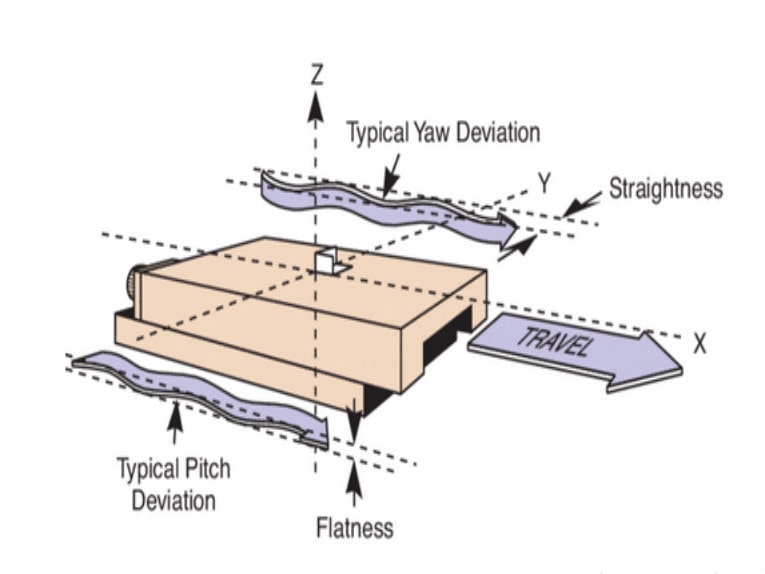
Il mio sistema necessita di elevata precisione o ripetibilità (o entrambe)?
La selezione dei componenti e la progettazione della macchina influenzano la precisione e la ripetibilità del sistema. Prima di rispondere a questa domanda, definiamo la precisione e la ripetibilità per i sistemi lineari. 【Precisione】 Nel movimento lineare, esistono generalmente due categorie di precisione: precisione di posizionamento e precisione di traslazione. P...Per saperne di più -
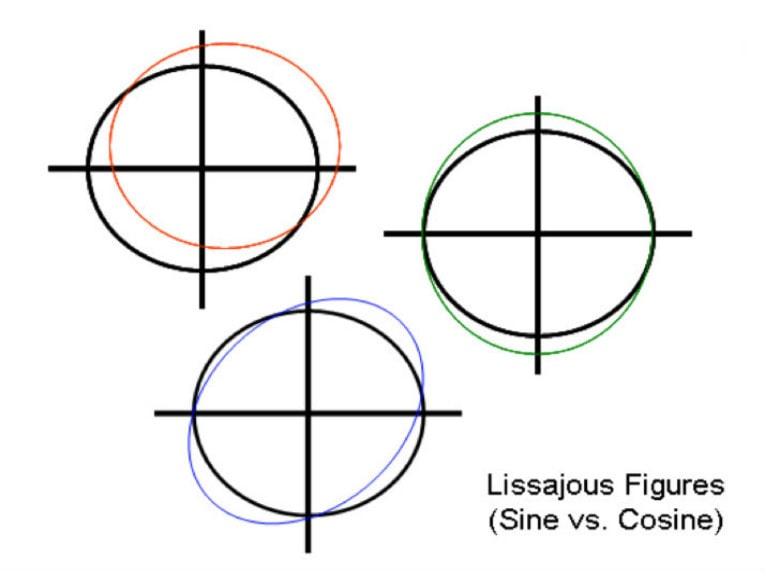
Che cos'è l'errore di suddivisione (SDE) negli encoder lineari?
Precisione dell'interpolazione. Per determinare la posizione di un asse lineare, una testina di lettura dell'encoder si muove lungo una scala e "legge" le variazioni di luce (per gli encoder ottici) o di campo magnetico (per quelli magnetici). Quando la testina di lettura registra queste variazioni, produce segnali seno e coseno che sono...Per saperne di più -

Sistemi lineari per il nanoposizionamento
Attuatori piezoelettrici, attuatori a bobina mobile, stadi di motori lineari. Quando parliamo di movimento lineare, in genere ci riferiamo ad applicazioni in cui la distanza di spostamento è di almeno qualche centinaio di millimetri e il posizionamento richiesto è nell'ordine di pochi decimi di millimetro. E per questi requisiti...Per saperne di più -
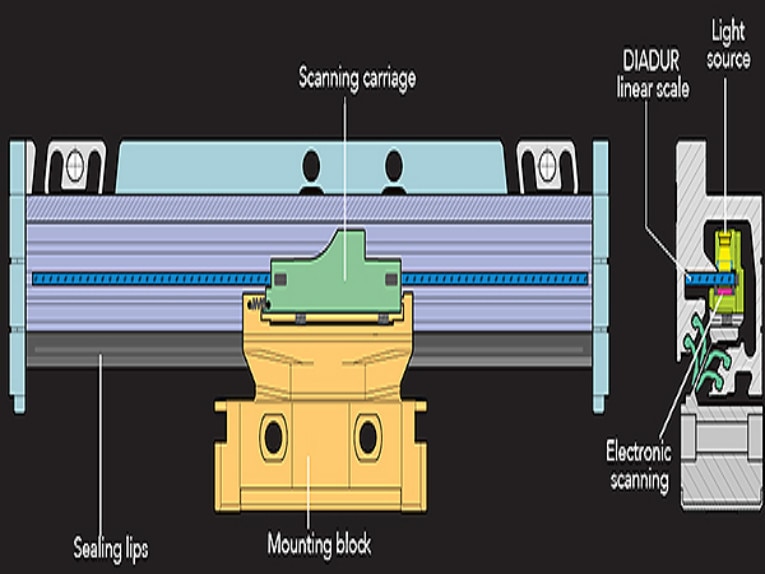
Domande frequenti: Quali tipi di encoder lineari esistono e come si sceglie?
Assoluti o incrementali, ottici o magnetici. Gli encoder lineari monitorano il movimento lineare e forniscono un feedback di posizione sotto forma di segnali elettrici. Nei sistemi servoassistiti, gli encoder lineari forniscono la posizione precisa del carico, in genere oltre al feedback di velocità e direzione fornito...Per saperne di più -
Cosa fare quando il tuo sistema di movimento ti riserva delle sorprese
I sistemi ad anello e binario con ruote di guida sono più compatti e offrono una maggiore precisione di posizionamento e più opzioni per le posizioni di trasporto del carico rispetto ai sistemi di trasporto alternativi per applicazioni curvilinee. Nell'ambito della continua ricerca di riduzione dei costi di produzione, una tendenza negli impianti di produzione è...Per saperne di più -
Posizionamento di piattaforme e portali: nuove tendenze negli approcci di integrazione
La piattaforma di sollevamento lineare, rotativa, XY o verticale integra motore, azionamento e controllore. Vi è una crescente richiesta di soluzioni di movimentazione semplici o "chiavi in mano", pertanto i fornitori di componenti si stanno concentrando sempre più sull'integrazione per i produttori di apparecchiature originali (OEM) e gli ingegneri di stabilimento. Questo è particolarmente evidente nel settore...Per saperne di più -

La struttura di supporto semplice migliora l'efficienza dell'imballaggio in magazzino.
Il miglioramento dell'efficienza del confezionamento ha richiesto attenzione all'ergonomia, alla facilità di assemblaggio e all'efficienza dei costi. L'automazione sta cambiando il funzionamento dei centri di distribuzione tradizionali, poiché le aziende sono alla ricerca di nuovi modi per massimizzare l'efficienza, aumentare la precisione degli ordini e soddisfare la domanda dei clienti.Per saperne di più -

Che cos'è uno schermo a matrice LED?
Cartelloni pubblicitari a LED di alta gamma e sovversivi. I movimenti dinamici di ogni modulo dello schermo a matrice LED fuyu si combinano con lo schermo video per creare diverse combinazioni creative. Il punto di svolta della pubblicità bidimensionale guida l'onda epocale di sostituzione dei media e di apprezzamento della pubblicità...Per saperne di più -
Come stimare le proprie esigenze in materia di attuatori lineari con dati applicativi minimi
Carico, precisione, velocità e corsa. La scelta dei componenti per il movimento lineare durante la fase di sviluppo di un progetto è stata fonte di frustrazione per progettisti e ingegneri applicativi per decenni, soprattutto quando si tratta di sottosistemi complessi come gli attuatori lineari. Si consideri per un momento...Per saperne di più -

Quale tipo di attuatore lineare è più adatto per forze di spinta?
Progettazione elettromeccanica nelle applicazioni di controllo del movimento. Quando un'applicazione richiede forze di spinta pure, il tipo di attuatore lineare più adatto è spesso un attuatore a stelo. Denominati anche "attuatori di spinta" e (quando è integrato un motore) "attuatori elettrici", questi dispositivi elettromeccanici...Per saperne di più -

Attuatori lineari: la scelta tra produzione interna e acquisto esterno.
Valutazione aziendale, requisiti di produzione e assemblaggio, esigenze di assistenza clienti. Con la vasta gamma di attuatori lineari disponibili sul mercato, per i costruttori di macchine e gli utenti finali sta diventando sempre più facile trovare un prodotto standard o "standard personalizzato" che soddisfi anche i requisiti applicativi più specifici...Per saperne di più -
Principi di base degli attuatori: cinque diverse tecnologie integrate in un unico pacchetto.
Fonte di energia motrice, mezzi di trasmissione, cuscinetti o guida, telaio o struttura di supporto, feedback di posizione (nella maggior parte dei casi). Un altro ambito della meccatronica che crea molta confusione è quello degli attuatori. Il problema è che si possono acquistare attuatori che sono assemblaggi di diversi componenti, oppure...Per saperne di più
