








ההיגיון הבסיסי של צילינדרים חשמליים הוא לספק עבודה שימושית על ידי המרת התנועה הסיבובית (מעגלית) של רכיב הנעה לתנועה לינארית (ישר). דגמי הצילינדרים החשמליים נבדלים בהתאם לסוג המנוע שיספק תנועה סיבובית, סוג ציר הבורג שיספק תנועה לינארית וסוגי החיבורים המאפשרים שילוב של שני רכיבים אלה.
צילינדרים חשמליים מושווים לעתים קרובות לצילינדרים פנאומטיים בשל תחומי היישום שלהם. השוואה זו יכולה להתבצע לעיתים עם צילינדרים הידראוליים. לכל שלוש המערכות יתרונות וחסרונות בהתאם למאפייניהן. על המשתמשים לשקול סוגיות אלו בעת בחירת מוצרים ליישום שלהם. מפעילים חשמליים משמשים בייצור מכונות, רכב ותת-תעשיית הרכב, מזון, טקסטיל, אריזה ואריזה, מכשירים רפואיים, מכשירי בדיקה, רובוטיקה ויישומי אלקטרוניקה. צילינדרים חשמליים מופרדים ממערכות אחרות ובעלי מבנה מכני. התנועה מסופקת על ידי ציר בורג הממוקם בגוף. בורג הכדור מאפשר העברת כוח על ידי המרת התנועה המעגלית שהוא מקבל מהמנוע לתנועה ליניארית. בהתאם למוצרים המכניים המשמשים בצילינדרים חשמליים ולסוג המנוע, ניתנים דיוק מיקום גבוה, בקרת מהירות ובקרת כוח.
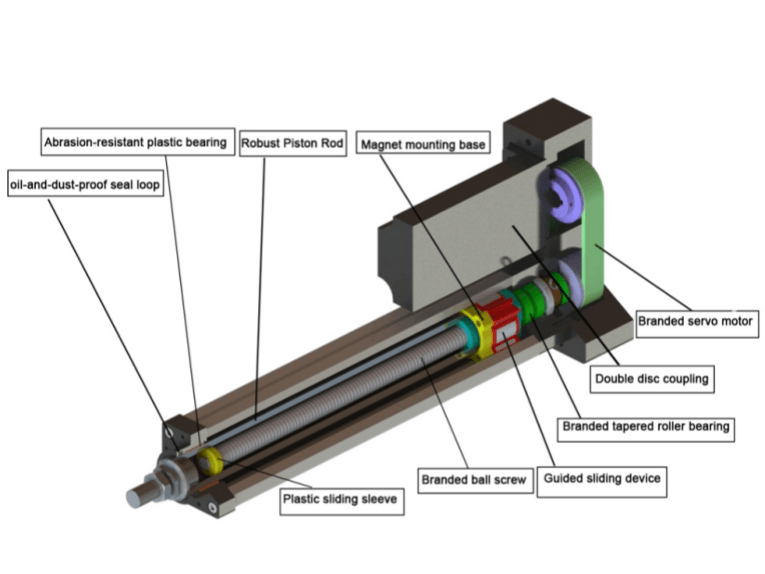
מבנה גליל חשמלי
מבנה הצילינדר החשמלי מורכב בעיקרו מ-3 אלמנטים עיקריים. מכיוון שניתן להעריך את חלק הצילינדר בנפרד, המנוע נתפס בדרך כלל כמשולב.
1. צילינדר
הצילינדר הוא האלמנט שמבצע את העבודה על ידי המרת התנועה המעגלית שהוא מקבל מהמנוע לתנועה ליניארית. בהתאם למוצרים המכניים שבהם נעשה שימוש, קיבולת העומס המרבית, דיוק המיקום, המהירות המרבית ואורך הפעולה המרבי של הצילינדר משתנים.
2. מתאם חיבור מנוע
זהו המנגנון שמעביר את תנועת המנוע לצילינדר. הוא מחובר בין הצילינדר למנוע. בהתאם ליישום, ניתן להרכיב את המנוע בצורה צירית או מקבילה לצילינדר.
3. מנוע
המנוע הוא מקור הכוח העיקרי של הצילינדר. הוא המספק את תנועתו לצילינדר. צילינדרים חשמליים; ניתן להשתמש בהם עם שילוב של מנוע סרוו, מנוע צעד, מנוע DC, מנוע AC.
ניתן לשלוט בכוח המופעל על ידי גליל חשמלי עם מנוע סרוו משולב ללא צורך בציוד חיצוני. בעזרת גליל חשמלי המשמש עם מנוע סרוו, ניתן לבצע מיקום מדויק ביותר ממיקום אחד. ניתן לקבל משוב לגבי המיקום שבוצע. ניתן לשנות את ערכי המהירות והתאוצה של הגליל החשמלי במהלך התהליך. ניתן לשלוט בכל הפעולות הללו באמצעות בקר בקרה (PLC). עבור סוגים אחרים של גנרטורים ליניאריים, פעולות אלו אפשריות עם הוספת ציוד חיצוני (חיישן, סולם ליניארי וכו').
תכונות צילינדר חשמלי
1. בקרת מיקום עם צילינדר חשמלי
ניתן לבצע מיקום מדויק ביותר ממיקום אחד בעזרת צילינדרים חשמליים. דיוק המיקום של הצילינדר החשמלי תלוי בדיוק של בורג הכדור וברכיב קורא המיקום בו נעשה שימוש. הצילינדר נע בצעד של בורג הכדור עבור כל סיבוב של המנוע. ברגע שהתנועה נעצרת, הצילינדר ממוצב. על ידי שליטה בתנועה שתינתן לבורג הכדור, ניתן למקם את הצילינדר במיקום הרצוי.
בעוד שניתן להשיג דיוק מיקום של 0.02 מ"מ באמצעות שימוש בציר בורג כדורי בצילינדרים חשמליים, ערך זה נשאר בסדר גודל של 0.1 מ"מ באמצעות שימוש בציר טרפז. בחירת רכיב קורא המיקום (מקודד, סקאלה ליניארית וכו') חייבת להיות מתאימה לערכי דיוק המיקום הרצויים.
בעזרת גליל חשמלי המשולב במנוע סרבו, ניתן לקרוא מידע על המיקום ללא צורך באלמנטים חיצוניים. ניתן לעבד ולנתח מידע זה. הגליל ממוקם במיקומו השני לאחר המתנה זמן מה במיקומו הראשון. מספר המיקומים אינו מוגבל לשניים, ניתן להגדילו.
אם משתמשים בצילינדרים חשמליים עם מנועים שאין להם רכיב קורא מיקום פנימי, נדרש ציוד חיצוני לביצוע בקרת מיקום. ניתן לבצע מיקום על ידי בקרת תנועת הצילינדר בעזרת מידע המיקום המתקבל מציוד חיצוני.
2. בקרת מהירות עם צילינדר חשמלי
מהירות הצילינדר החשמלי תלויה בגובה בורג הכדור ובמהירות המנוע. ניתן לשלוט במהירות על ידי שינוי מספר הסיבובים של בורג הכדור. ניתן לשנות את המהירות על ידי שינוי מהירות המנוע במהלך התנועה. ניתן לבטל הפסדי זמן על ידי התאמת התאוצות בהתאם ליישום. בעוד שהצילינדר נע במהירות נמוכה יותר כדי להגיע למיקומו הראשון, לאחר פרק זמן מסוים הוא נע במהירות גבוהה יותר כדי להגיע למיקומו השני.
3. בקרת תאוצה של צילינדר חשמלי
על ידי שינוי ערכי התאוצה וההאטה של המנוע המשולב בצילינדר החשמלי, ניתן לשלוט בתאוצת הצילינדר. זה מונע מהצילינדר לבצע התחלות ועצירות מסוכנות תחת עומסים כבדים. ביישומים הדורשים זמני מחזור מהירים, ניתן להשיג את זמני המחזור הרצויים על ידי כוונון התחלות ועצירות מהירות. הצילינדר מגיע למהירות מסוימת עם ערכי תאוצה שונים.
4. בקרת כוח עם צילינדר חשמלי
הכוח המופעל על ידי הצילינדר החשמלי תלוי בהספק המנוע בו נעשה שימוש ובמבנה המכני של הצילינדר. ניתן לשלוט בכוח הצילינדר על ידי שליטה בהספק המנוע. כיום, מתקבלים כוחות של 300 kN עם צילינדרים חשמליים.
ניתן לשלוט בכוח באמצעות מצב מומנט המנוע בצילינדר החשמלי עם מנוע סרוו משולב. ניתן להגביל את הצילינדר על ידי כוח מסוים, כך שיישאר קבוע תחת כוח מסוים. ניתן לקרוא מידע על כוח ומיקום. ניתן לעבד ולהעריך מידע זה. ייתכן שיהיה צורך להשתמש בחיישן הכוח בהתאם לרגישות הרצויה במידע הכוח. ניתן להשיג מידע זה באמצעות חיישן הכוח כאשר המנוע מופעל ללא מצב מומנט בצילינדר החשמלי.
צילינדרים חשמליים הם אחד מפירות הטכנולוגיה המתפתחת והמהפכה התעשייתית הרביעית. השימוש הנרחב במערכות חכמות עם מספר מחזורים גבוה, המאפשר ייצור של מוצרים שונים באותה מכונה, ועלויות תפעול נמוכות, מגביר את הצורך בצילינדרים חשמליים. הצפי הוא שמוצרים אלה יתפסו את מקומם במידה רבה עם הזמן, שכן הם מספקים יתרונות רבים בהשוואה לצילינדרים שנהנים מכוח נוזלים. צילינדרים חשמליים מופרדים ממערכות אחרות ובעלי מבנה מכני. התנועה מסופקת על ידי ציר בורג הממוקם בגוף. בורג הכדור מאפשר העברת כוח על ידי המרת התנועה המעגלית שהוא מקבל מהמנוע לתנועה ליניארית. בהתאם למוצרים המכניים המשמשים בצילינדרים חשמליים ולסוג המנוע, ניתנים דיוק מיקום גבוה, בקרת מהירות ובקרת כוח. צילינדרים חשמליים הם מוצרים ידידותיים לסביבה בנוסף ליתרונות שהם מספקים למשתמש. מבחינת יעילות אנרגטית, שהיא אחת מאחריותנו הגדולה ביותר כיום, צילינדרים חשמליים רגישים מאוד בהשוואה למערכות אחרות. לאחר 2000 שעות של בדיקה באותם תנאים, עומס ומהירות, נבדק כי הגליל החשמלי יעיל פי 11 מבחינת צריכת אנרגיה מאשר הגליל הפנאומטי.
זמן פרסום: 18 במאי 2026