







-

Топ-5 применений промышленной робототехники
Сборка, комплектация и упаковка, удаление материалов, сварка, покраска. От пищевой промышленности до автомобилестроения промышленные роботы становятся повсеместными. Высокоавтоматизированные и программируемые, эти машины выполняют повторяющиеся задачи с высокой точностью, надежностью и производительностью. Благодаря этим преимуществам...Читать далее -
Что делать, если ваша система управления движением выдала ошибку?
Преимущества кольцевых и направляющих систем: Кольцевые и направляющие системы на основе направляющих колес более компактны, обеспечивают более высокую точность позиционирования и больше вариантов расположения груза, чем альтернативные конвейерные системы для криволинейных применений. В постоянном стремлении к снижению производственных затрат один из способов...Читать далее -

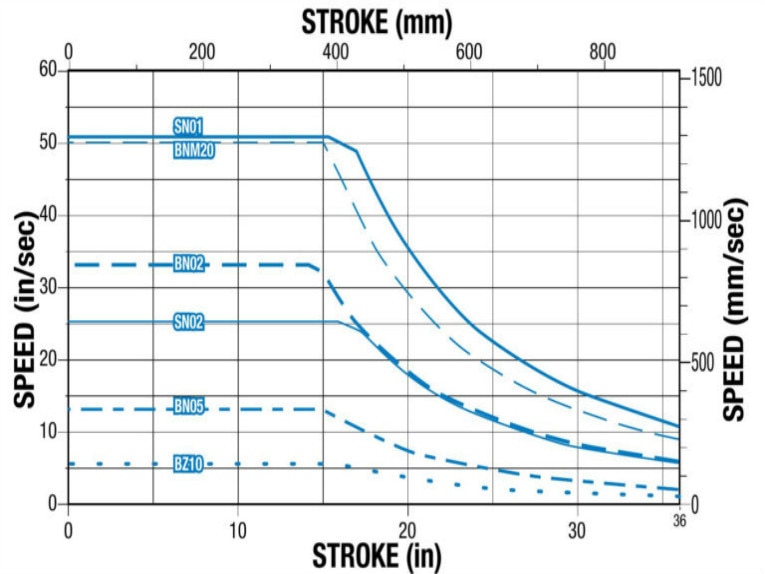
Пять факторов, которые следует учитывать при выборе линейного актуатора
Длина хода, скорость, точность, монтаж, техническое обслуживание. Вы работаете над приложением, требующим линейного перемещения — возможно, это система захвата и перемещения, упаковочная линия или портал для транспортировки материалов — но проектирование собственного привода с нуля, поиск различных деталей, монтаж...Читать далее -
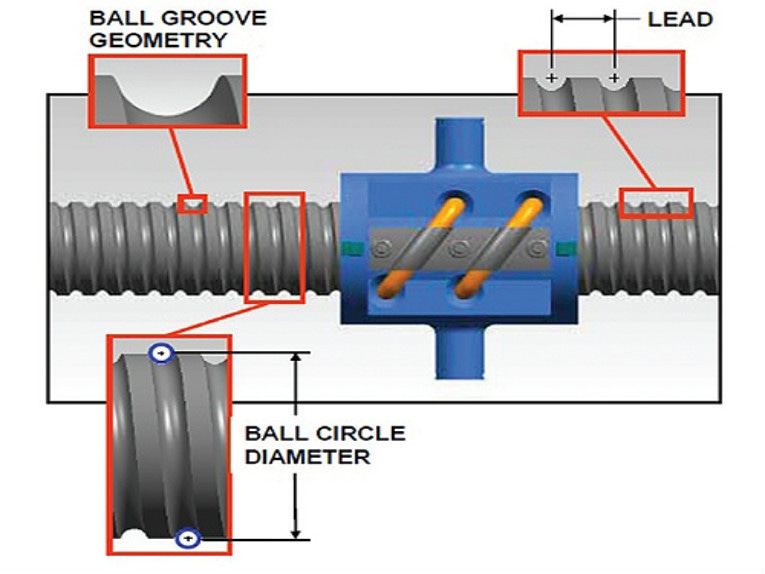
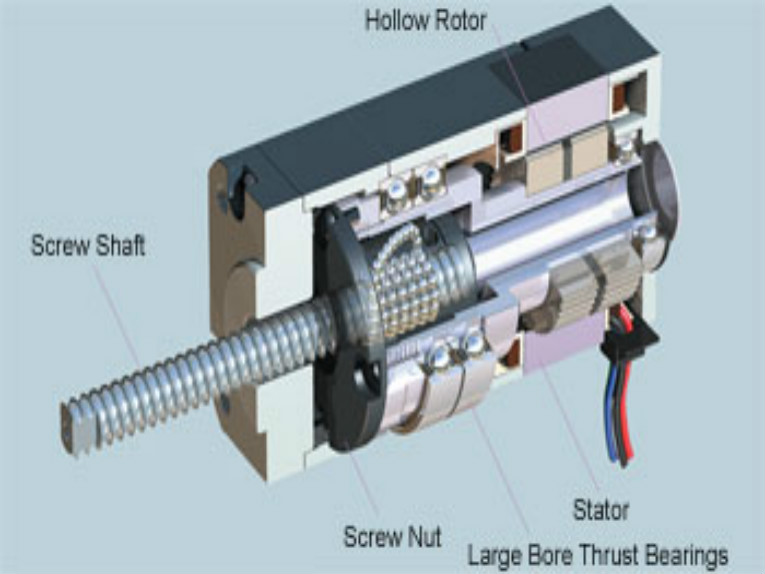
Как выбрать, подобрать и установить линейные шариковинтовые приводы
Системы возврата шариков, выбор шариковинтовой передачи и смазка шариковинтовой передачи. Правильный выбор шариковинтовой передачи для конкретного применения обеспечит точность, повторяемость и срок службы машины, минимизируя при этом общие затраты на эксплуатацию. Шариковинтовая передача преобразует вращательное движение в линейное или...Читать далее -
Как оценить потребности в линейных актуаторах, имея минимальное количество данных о применении?
Высокие моментные нагрузки могут потребовать использования линейного актуатора с двойной направляющей. Выбор актуатора, основанный на приблизительных оценках требований к производительности, arguably более рискован, чем выбор линейной направляющей или привода с минимальной информацией о применении. Но тем не менее, довольно часто встречается ситуация, когда...Читать далее -
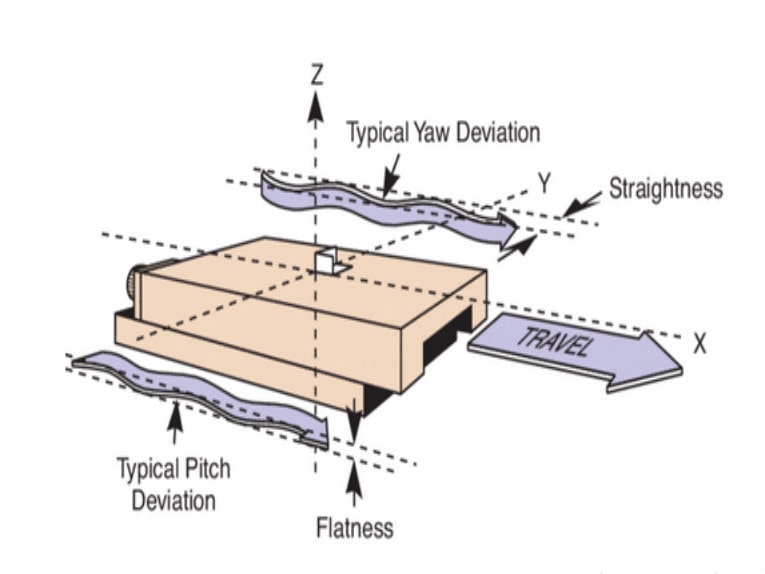
Требуется ли моей системе высокая точность или воспроизводимость (или и то, и другое)?
Выбор компонентов и конструкция машины влияют на точность и повторяемость системы. Прежде чем ответить на этот вопрос, давайте определим, что такое точность и повторяемость для линейных систем. 【Точность】 В линейном перемещении существуют две основные категории точности – точность позиционирования и точность перемещения. P...Читать далее -
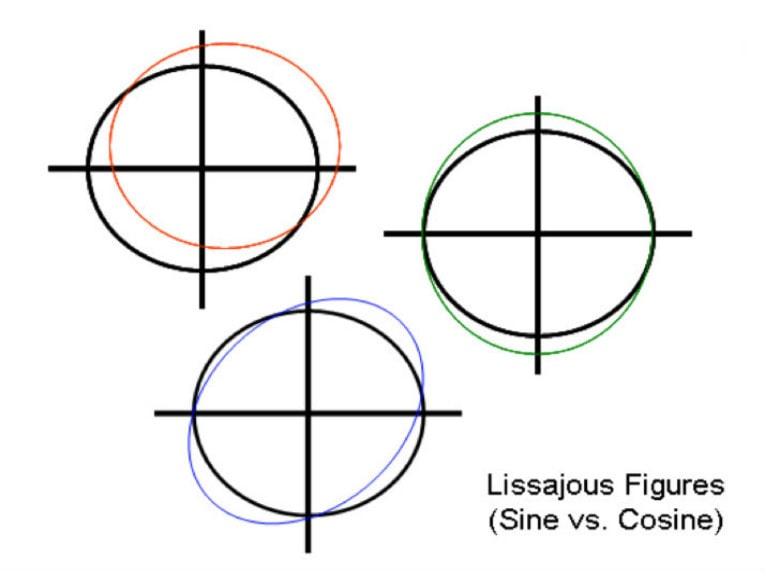
Что такое ошибка подразделения (SDE) в линейных энкодерах?
Точность интерполяции. Для определения положения линейной оси считывающая головка энкодера перемещается вдоль шкалы и «считывает» изменения света (для оптических энкодеров) или магнитного поля (для магнитных энкодеров). По мере регистрации этих изменений считывающая головка генерирует синусоидальные и косинусоидальные сигналы, которые...Читать далее -

Линейные системы для нанопозиционирования
Пьезоэлектрические актуаторы, актуаторы с звуковой катушкой, линейные мотор-приводы. Когда мы говорим о линейном перемещении, мы обычно имеем в виду приложения, где расстояние перемещения составляет не менее нескольких сотен миллиметров, а требуемое позиционирование находится в диапазоне нескольких десятых миллиметра. И для таких требований...Читать далее -
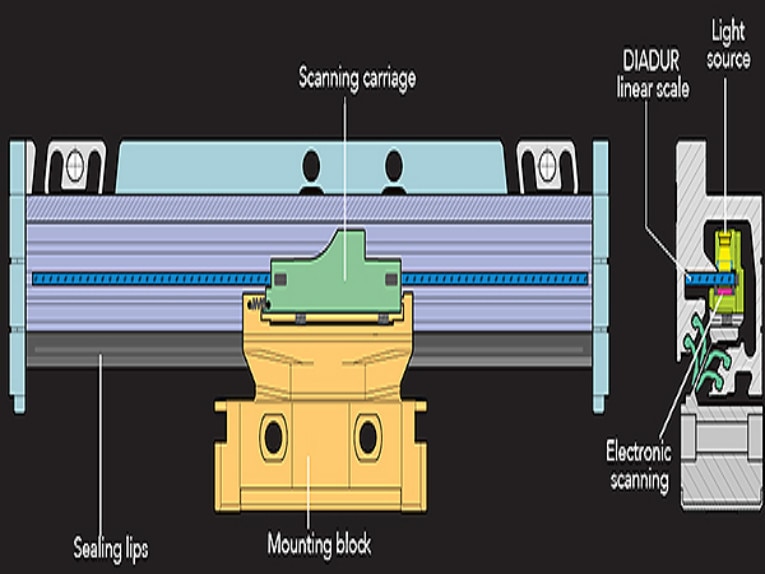
Часто задаваемые вопросы: Какие типы линейных энкодеров существуют и как их выбрать?
Абсолютные или инкрементальные, оптические или магнитные. Линейные энкодеры отслеживают линейное перемещение и обеспечивают обратную связь по положению в виде электрических сигналов. В сервоприводных системах линейные энкодеры обеспечивают точное определение положения нагрузки, как правило, в дополнение к обратной связи по скорости и направлению...Читать далее -
Что делать, если ваша система управления движением выдала ошибку?
Системы кольцевых и рельсовых направляющих на основе направляющих колес более компактны, обеспечивают более высокую точность позиционирования и больше возможностей для размещения груза, чем альтернативные конвейерные системы для криволинейных применений. В рамках постоянного стремления к снижению производственных затрат одной из тенденций на производственных предприятиях является...Читать далее -
Этажи для позиционирования и портальные краны — новые тенденции в подходах к интеграции.
Линейные, поворотные, XY или вертикальные подъемные платформы объединяют двигатель, привод и контроллер. Существует спрос на конструкции, обеспечивающие простоту или готовность к эксплуатации «под ключ», поэтому поставщики компонентов сейчас все активнее занимаются интеграцией для OEM-производителей и инженеров предприятий. Нигде это не проявляется так ярко, как в...Читать далее -

Простая опорная конструкция повышает эффективность упаковки на складе.
Для повышения эффективности упаковки необходимо уделять внимание эргономике, простоте сборки и экономической эффективности. Автоматизация меняет работу традиционных распределительных центров, поскольку компании ищут новые способы максимизации эффективности, повышения точности выполнения заказов и удовлетворения спроса клиентов. ...Читать далее
