







-
كيفية تنفيذ نظام تحديد المواقع الخطي المخصص؟
في المقال السابق، ركزنا على أهمية مرحلة تصميم البرنامج ومواصفات عملية شركة فويو الخاصة بالتصميم غير القياسي. فكيف ننفذ الخطة بعد تحديدها؟ لنفترض أولاً موقفاً في ورشة إنتاج فويو، حيث...اقرأ المزيد -

تحديد حجم واختيار أنظمة الحركة الخطية
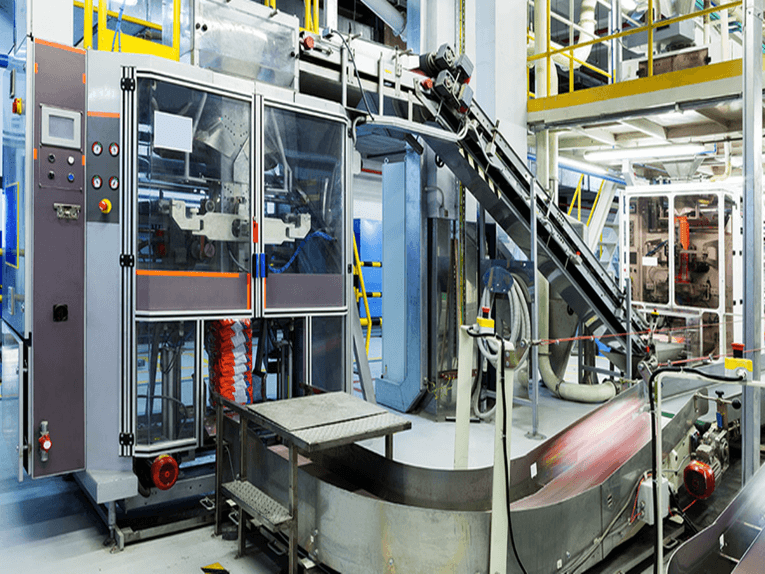
كيف يمكن لتقنية "LOSTPED" أن تساعد؟ من التعبئة والتغليف ومناولة المواد إلى تصنيع أشباه الموصلات وتجميع السيارات، تتضمن جميع عمليات التصنيع تقريبًا نوعًا من الحركة الخطية، ومع ازدياد إلمام المصنّعين بمرونة وبساطة الحركة الخطية المعيارية...اقرأ المزيد -

تحقيق حركة خطية خالية من المخاطر
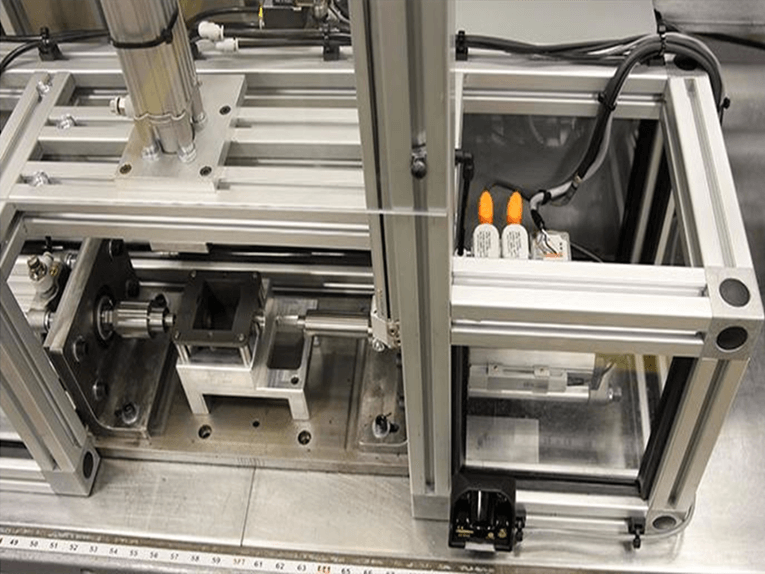
مزايا السلامة للمشغلات الكهروميكانيكية مقارنةً بالأسطوانات الهيدروليكية. يتزايد اعتماد مصممي آلات الحركة الخطية على المشغلات الكهروميكانيكية نظرًا لكونها أنظف وأسهل في التحكم وأقل حاجةً للصيانة من الأسطوانات الهيدروليكية. مع ذلك، غالبًا ما يتم تجاهل...اقرأ المزيد -
محركان يوفران حركة دقيقة ثنائية السرعة
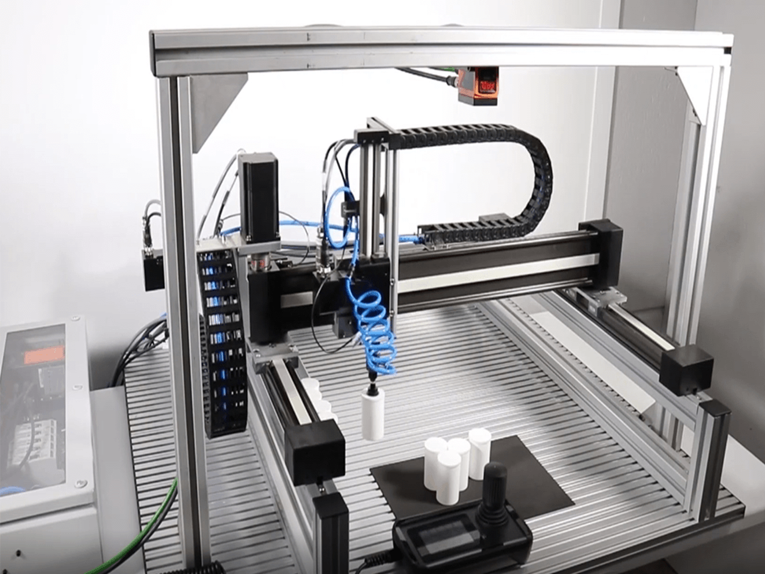
تتطلب أنظمة تحديد المواقع الخطية عالية الدقة، كتلك المستخدمة في التركيز والمسح الضوئي في معدات القياس والفحص، نمطين مختلفين للحركة: نمط سريع (100 مم/ثانية) يليه نمط أبطأ (20 مم/ثانية). يقلل النمط السريع من زمن الحركة، بينما يضمن النمط الأبطأ الدقة.اقرأ المزيد -

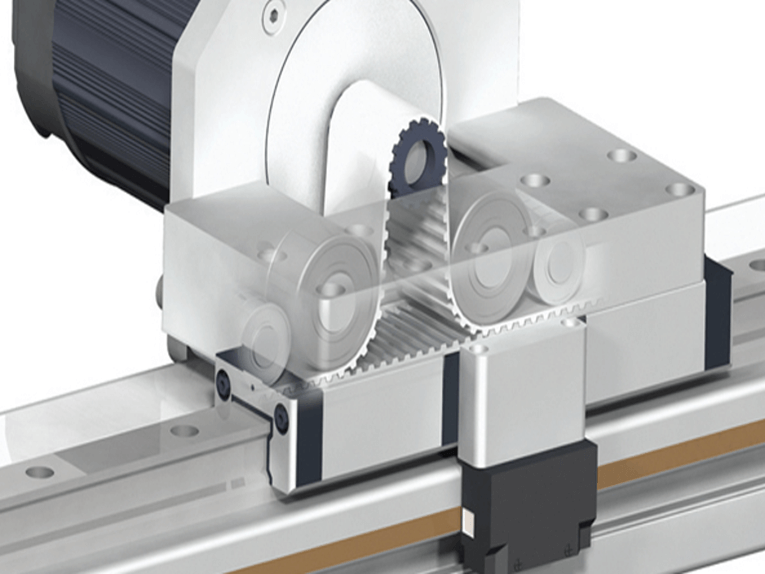
أحزمة التوقيت في نظام تحديد المواقع الخطي
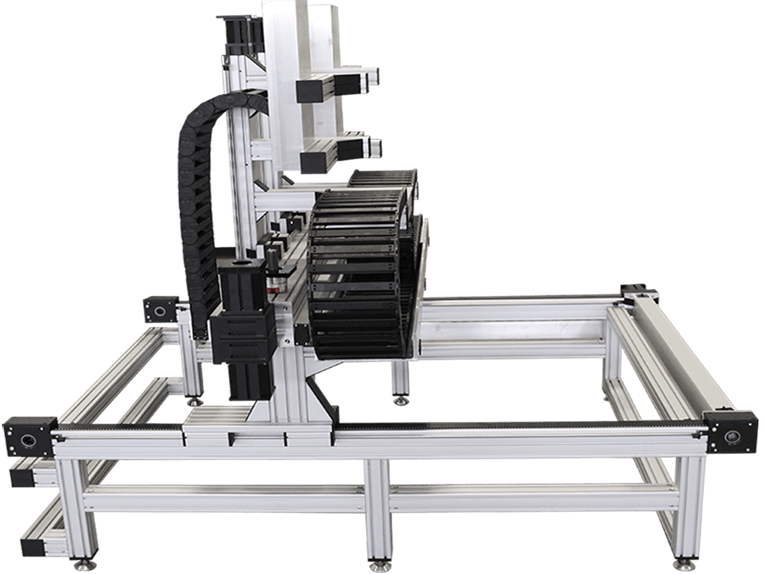
خطوة الحزام والبكرة، طول الحزام والمسافة بين مركزيه. تعمل أحزمة التوقيت المصنوعة من اليوريثان المقوى بكفاءة عالية في تطبيقات الحركة الخطية والنقل عالية الدقة، لأنها لا تتمدد إلا قليلاً، ولا تنزلق أو تتحرك زحفًا، كما أنها أكثر صلابة من النيوبرين، مما يعني انحرافًا أقل للأسنان. في الحركة الخطية...اقرأ المزيد -
تطورات في التحكم في تحديد المواقع
يواصل الباحثون البحث عن طرق لتحسين دقة أنظمة تحديد المواقع الخطية، وتقليل أو إزالة الارتداد، بالإضافة إلى تسهيل استخدام هذه الأجهزة. إليكم نظرة على التطورات الحديثة. سواء كانت الحركة الخطية المطلوبة صغيرة أو كبيرة، فإن دقة وموثوقية تحديد المواقع...اقرأ المزيد -
ما هو نظام الحركة الخطية المصمم حسب الطلب والذي يلبي احتياجات المستخدمين على أفضل وجه؟
وحدة تحديد المواقع الخطية غير القياسية. بالنسبة لشركة فويو، يمكن اعتبار الرسومات المنتجة سابقًا والوحدات القياسية مع المواد ذات الصلة منتجات معيارية. في المقابل، يمكن اعتبار التصاميم الجديدة التي تتضمن تغييرات تصميمية كبيرة نسبيًا بناءً على الوحدات الحالية "غير قياسية...اقرأ المزيد -
نصائح لاختيار أنظمة تحديد المواقع الخطية عالية الدقة: الجزء 3
تصميم المنصة، ونظام القيادة، والمشفّر. يجب أن تعمل المكونات التي تشكل نظام تحديد المواقع عالي الدقة - المحامل، ونظام قياس الموقع، ونظام المحرك ونظام القيادة، ووحدة التحكم - معًا بأفضل شكل ممكن. تناول الجزء الأول قاعدة النظام والمحامل. وتناول الجزء الثاني قياس الموقع...اقرأ المزيد -
نصائح لاختيار أنظمة تحديد المواقع الخطية عالية الدقة: الجزء الثاني
لا يوجد نظام واحد يناسب الجميع. يجب أن تعمل مكونات نظام تحديد المواقع عالي الدقة - القاعدة والمحامل، ونظام قياس الموقع، ونظام المحرك والقيادة، ووحدة التحكم - معًا بأفضل شكل ممكن. في الجزء الأول، تناولنا قاعدة النظام والمحامل. هنا، نتناول نظام تحديد المواقع...اقرأ المزيد -
نصائح لاختيار أنظمة تحديد المواقع الخطية عالية الدقة: الجزء الأول
تتطلب الصناعات الإلكترونية والبصرية والحاسوبية والتفتيشية والأتمتة والليزر مواصفات متنوعة لأنظمة تحديد المواقع. لا يوجد نظام واحد يناسب جميعها. ولضمان عمل نظام تحديد المواقع عالي الدقة على النحو الأمثل، يجب مراعاة مكونات النظام - المحامل، وأنظمة قياس المواقع...اقرأ المزيد -
متى يتم الاستعانة بمصادر خارجية: أنظمة الحركة الفرعية الجاهزة للاستخدام
يُجبر بناء المحركات والمنصات الحركية من الصفر المصممين على طلب وتخزين وتجميع مئات القطع. كما يُطيل ذلك وقت طرح المنتج في السوق ويتطلب فنيين ومعدات إنتاج متخصصة. ويُعدّ طلب أجهزة الحركة المُصممة مسبقًا بديلاً مناسبًا. المنصات والمحركات...اقرأ المزيد -

تحكم أدق في الحركة الخطية
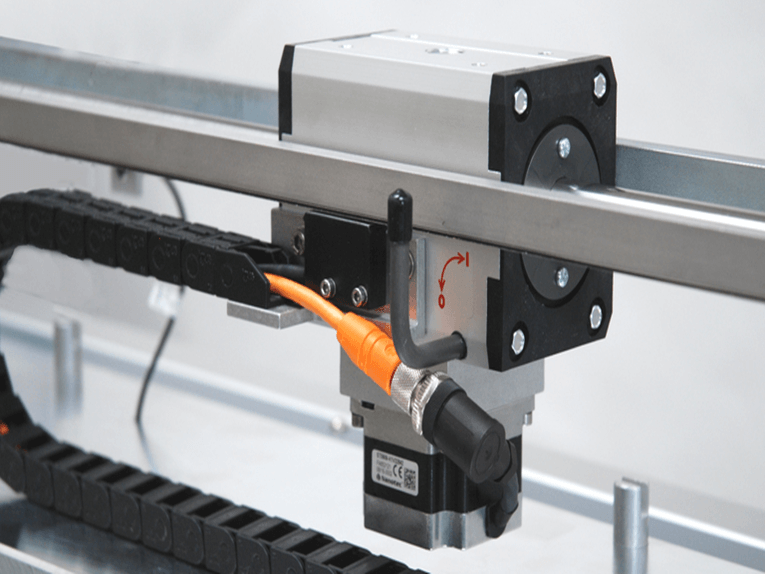
لتحقيق تحديد دقيق للموقع آليًا، يُنصح باستخدام المحركات الخطية القائمة على محركات الخطوة. تُولّد هذه المحركات قوة وحركة في خط مستقيم. في نظام ميكانيكي نموذجي، يوفر عمود الإخراج للجهاز حركة خطية باستخدام محرك دوار عبر تروس وحزام وبكرة...اقرأ المزيد
