







-

Lineaarimoottorit: Uuden teollisen vallankumouksen johtaminen
Lineaarimoottorit yleistyvät. Ne antavat koneille ehdottoman parhaan mahdollisen tarkkuuden ja dynaamisen suorituskyvyn. Lineaarimoottorit ovat erittäin nopeita ja tarkkoja paikannuksessa, mutta ne pystyvät myös hitaaseen, vakionopeuteen koneen päissä ja liukukiskoissa sekä työkalujen ja kappaleiden käsittelyjärjestelmissä. ...Lue lisää -
Harvoin kysyttyjä kysymyksiä lineaaritoimilaitteista
Tässä on pari kysymystä, jotka insinöörien ja suunnittelijoiden tulisi kysyä ennen lineaaritoimilaitteiden valitsemista. Suunnittelijoilla, jotka valmistautuvat valitsemaan lineaaritoimilaitteen tietylle laitteelle tai koneelle, tulisi olla valmiina lista kysymyksiä, joita he voivat kysyä kyseisten laitteiden toimittajilta ja valmistajilta. Nämä listat yleensä ...Lue lisää -

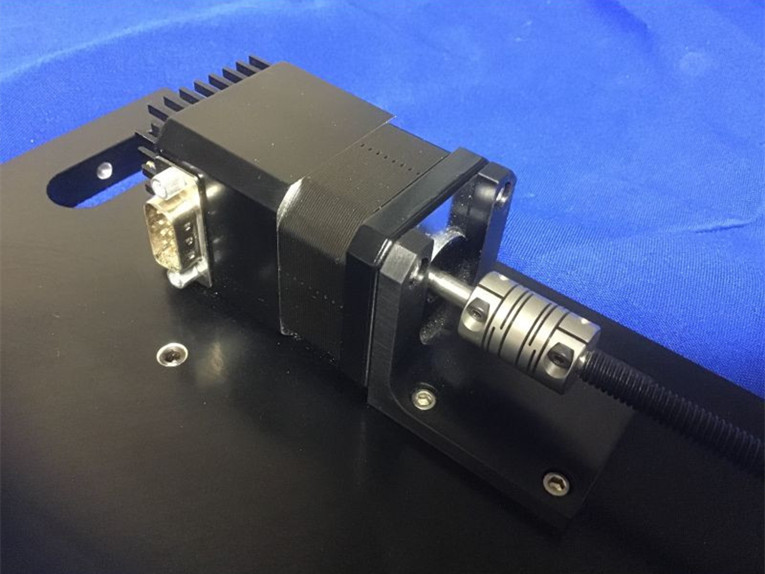
Liikkeenohjaus – Oikotie moottoreiden mitoitukseen
Moottorivakio auttaa valitsemaan tasavirtamoottoreita liikkeenohjaussovelluksiin. Harjalliset ja harjattomat tasavirtamoottorit ovat hyvä valinta tehoherkissä tai hyötysuhdetta vaativissa sovelluksissa. Usein tasavirtamoottorin tai generaattorin datalehdessä on moottorivakio Km, joka on vääntömomentille herkkä...Lue lisää -
Mikä tarjoaa tarkan paikannuksen ja erittäin dynaamisen vasteen liikkeenohjaustehtävissä?
Lineaarimoottori on avainratkaisu. Lineaarimoottorit tarjoavat tarkan paikannuksen ja erittäin dynaamisen vasteen moniin liikkeenohjaustehtäviin. Työstökoneissa näihin kuuluvat paitsi pikaliike, myös koneen päiden, karan luistien, työkalunhallintajärjestelmien ja kappaleiden käsikahvojen hidas, vakionopeusliike...Lue lisää -
Mitä eroa on teollisuusroboteilla?
Robottien maailman laajentuessa teollisuudessa on viisasta perehtyä erilaisiin saatavilla oleviin robottityyppeihin ja niiden ominaisuuksiin. Nykypäivän teollisuusautomaation alalla robotit käsittelevät vaikeita, vaarallisia ja toistuvia tehtäviä. Näihin töihin kuuluvat raskaiden esineiden nostaminen, poiminta...Lue lisää -
Kuinka toteuttaa räätälöidyn lineaaripaikannusjärjestelmän käyttöönotto?
Edellisessä artikkelissa keskityimme ohjelmasuunnitteluvaiheen tärkeyteen ja Fuyun omiin prosessispesifikaatioihin epästandardille suunnittelulle. Joten miten toteutamme toteutuksen suunnitelman määrittämisen jälkeen? Kuvitellaan ensin tilanne, jossa Fuyun tuotantopajassa sisäinen...Lue lisää -

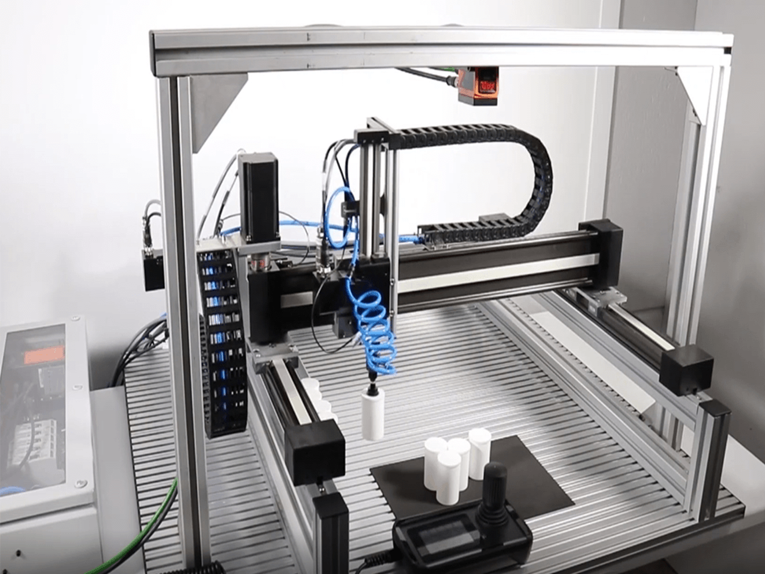
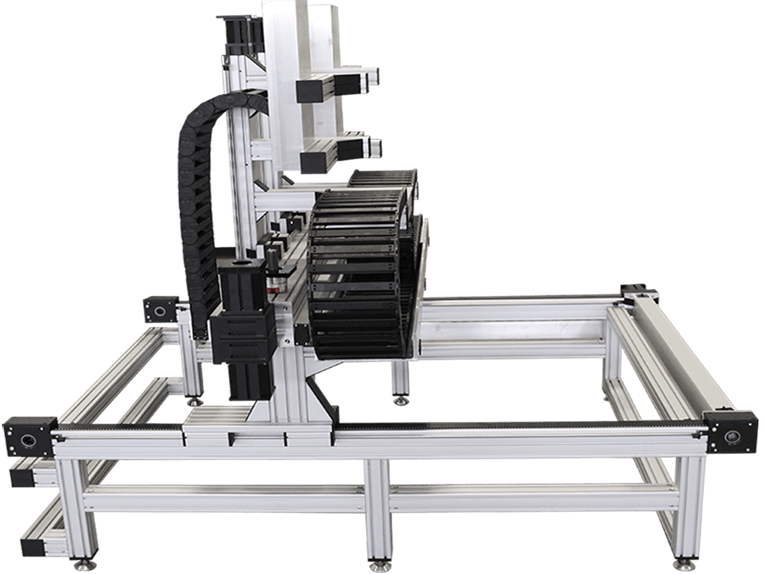
Lineaariliikejärjestelmien mitoitus ja valinta
Kuinka ”LOSTPED” voi auttaa? Pakkaamisesta ja materiaalinkäsittelystä puolijohteiden valmistukseen ja autoteollisuuden kokoonpanoon, käytännössä kaikki valmistusprosessit sisältävät jonkinlaista lineaarista liikettä, ja valmistajien tutustuessa modulaaristen lineaariliikkeiden joustavuuteen ja yksinkertaisuuteen ...Lue lisää -

Vaarattoman lineaarisen liikkeen saavuttaminen
Sähkömekaanisten toimilaitteiden turvallisuusperustelu hydraulisylintereihin verrattuna. Lineaariliikekoneiden suunnittelijat valitsevat yhä useammin sähkömekaanisia toimilaitteita, koska ne ovat puhtaampia, helpompia hallita ja vaativat vähemmän huoltoa kuin hydraulisylinterit. Usein unohdetaan kuitenkin...Lue lisää -
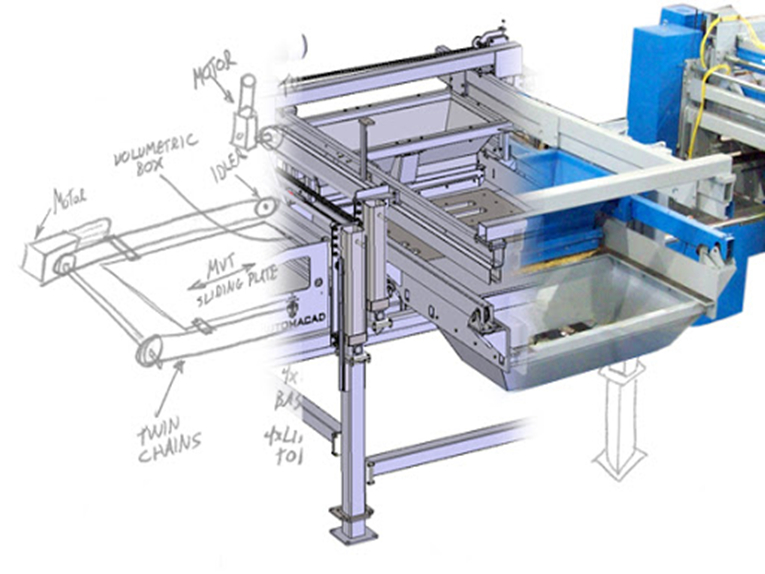
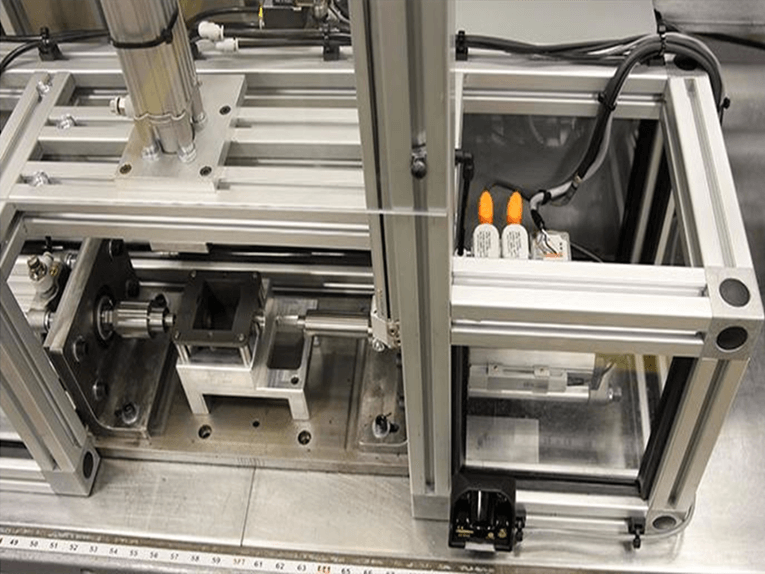
Kaksi käyttöä takaavat tarkan kaksoisnopeuksisen liikkeen
Erittäin tarkat lineaariset paikannusjärjestelmät, kuten mittaus- ja tarkastuslaitteiden tarkennukseen ja skannaukseen käytettävät järjestelmät, tarvitsevat usein kaksi erilaista liiketilaa: nopean tilan (100 mm/s) ja hitaamman tilan (20 nm/s). Nopea tila lyhentää liikeaikaa, kun taas hitaampi tila varmistaa tarkkuuden. Käyttäjä...Lue lisää -

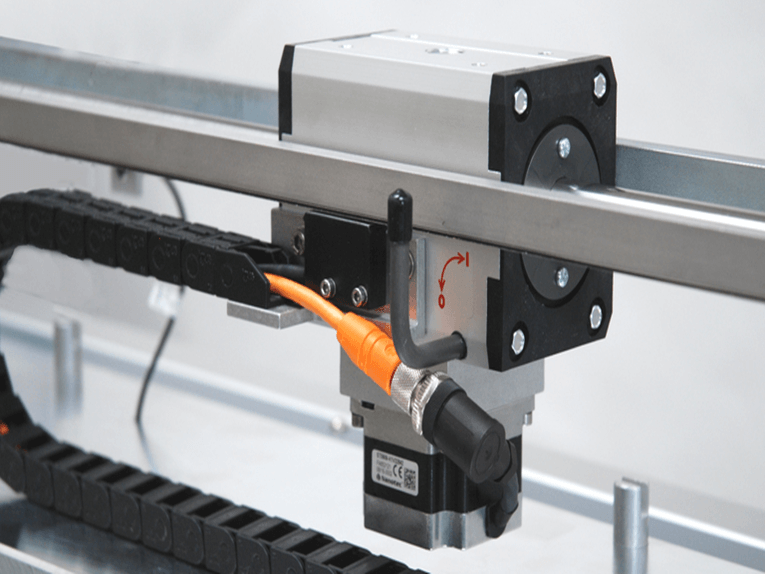
Lineaarisen paikannusjärjestelmän hammashihnat
Hihnan ja hihnapyörän jako, hihnan pituus ja keskipisteiden välinen etäisyys. Vahvistetut uretaanista valmistetut hammashihnat toimivat hyvin tarkoissa lineaariliikkeissä ja kuljetussovelluksissa, koska ne venyvät hyvin vähän, eivät viru tai luista ja ovat paljon jäykempiä kuin neopreeni, mikä tarkoittaa pienempää hampaan taipumista. Lineaariliikkeessä...Lue lisää -
Paikannusohjauksen kehitys
Tutkijat etsivät jatkuvasti tapoja parantaa lineaaristen paikannusjärjestelmien tarkkuutta, vähentää tai poistaa välystä sekä helpottaa tällaisten laitteiden käyttöä. Tässä katsaus viimeaikaiseen kehitykseen. Olipa tarvittava lineaarinen liike pieni tai suuri, paikannustarkkuus ja luotettavuus...Lue lisää -
Mikä on räätälöity lineaariliikejärjestelmä, joka parhaiten vastaa käyttäjien tarpeisiin?
Epästandardi lineaarinen paikannusmoduuli. Fuyun aiemmin tuotetut piirustukset ja standardoidut moduulit niihin liittyvine materiaaleineen voidaan katsoa modulaarisiksi tuotteiksi. Toisaalta uusia malleja, joissa on suhteellisen suuria suunnittelumuutoksia olemassa olevien moduulien pohjalta, voidaan pitää "epästandardina...".Lue lisää
