







-

Mitkä moottorit ovat parhaat: servot vai askelmoottorit?
Suljetun silmukan askelmoottorit saattavat olla paras valinta tehtäviin, jotka tyypillisesti tehdään servomoottoreilla, koska perinteiset askelmoottorit eivät pystyneet käsittelemään niitä. Yksi kriittisimmistä päätöksistä, joita insinöörit voivat tehdä suunnitellessaan minkä tahansa tyyppistä liikkeenohjausprosessia, on moottorin valinta. Oikean moottorin hankkiminen sekä ...Lue lisää -
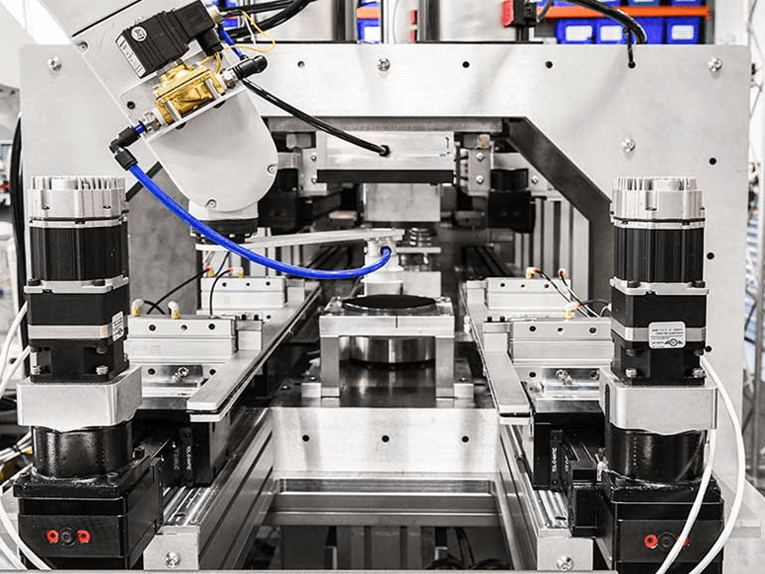
Viisi keskeistä tekijää tarkkuuslineaarimoduulien valinnassa
Asennusvalmiita lineaarimoduuleja käytetään monilla eri teollisuudenaloilla materiaalien, tuotteiden ja tuotantotyökalujen siirtämiseen monenlaisissa koneissa. Konesuunnittelijoilla on useita vaihtoehtoja lineaarimoduuleja valitessaan tiettyjen tuotanto- ja suorituskykyvaatimusten perusteella...Lue lisää -

Hyvän konesuunnittelun edellytykset
Olipa liikkeenohjain kuinka hienostunut tahansa, se ei voi voittaa huonosti suunniteltua sähkömekaanista järjestelmää. Liikkeenohjausjärjestelmät koostuvat kolmesta pääkomponentista: paikannusmekanismista, moottorin käyttöelektroniikasta ja liikkeenohjaimesta. Jokainen näistä komponenteista tulee huolellisesti...Lue lisää -
Lineaarisen liikejärjestelmän suunnittelu
Ota huomioon tuet, ohjaimet, käyttölaitteet ja tiivisteet lineaarijärjestelmän suunnittelussa. Tunne tarkkuus-, toistettavuus-, kuormitus- ja ympäristövaatimukset ennen lineaarijärjestelmän suunnittelun aloittamista. Vähäkitkaiset ja jäykät kuulaohjaimet tukevat yhtä (ylhäällä) tai kahta (alhaalla) kiskoa. Kompromissit...Lue lisää -
Sähköiset lineaaritoimilaitteet: Tee vai osta?
Sähköisen lineaarikaramoottorijärjestelmän suunnittelu itse on usein kustannustehokkain ja aikaa säästäväisin tapa automatisoituun liikeratkaisuun. Joskus on parempi ostaa järjestelmä. Kukapa tietäisi paremmin kuin sinä tarkalleen, mitä sähköinen lineaarikaramoottorisi tarvitsee? Ja nykyään voit ostaa niin paljon valmiita...Lue lisää -
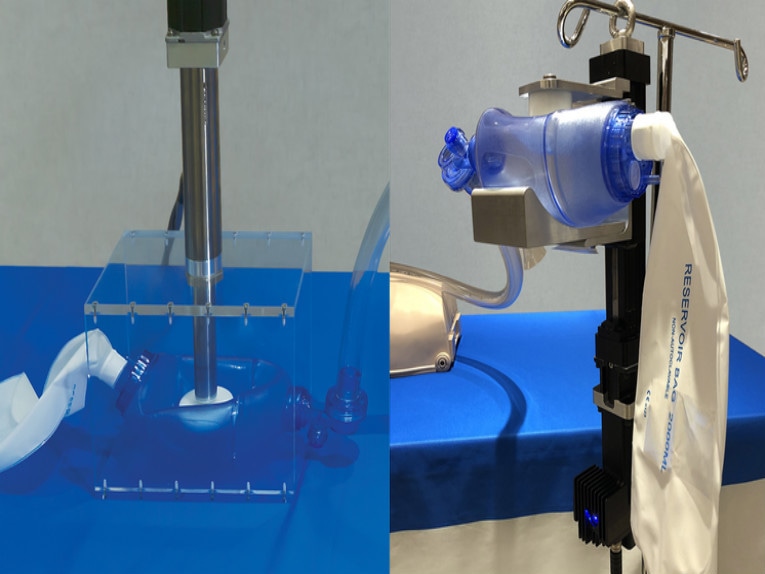
Uudet hengityskoneiden prototyypit perustuvat lineaarisiin toimilaitteisiin
Turvallinen ja tehokas hapen antaminen potilaille. Pussiventtiilimaskeja, joita kutsutaan myös ambu-pusseiksi (keinotekoiset manuaaliset hengityslaitteet), käytetään hapen antamiseen potilaille, jotka eivät hengitä itse. Vaikka ne ovat pelastaneet monia ihmishenkiä, ne eivät sovellu hyvin potilaiden hoitoon, joilla on...Lue lisää -
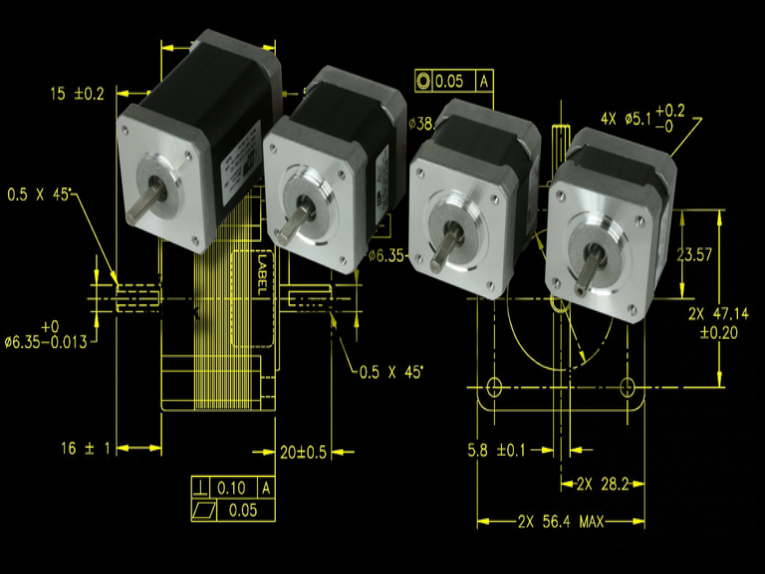
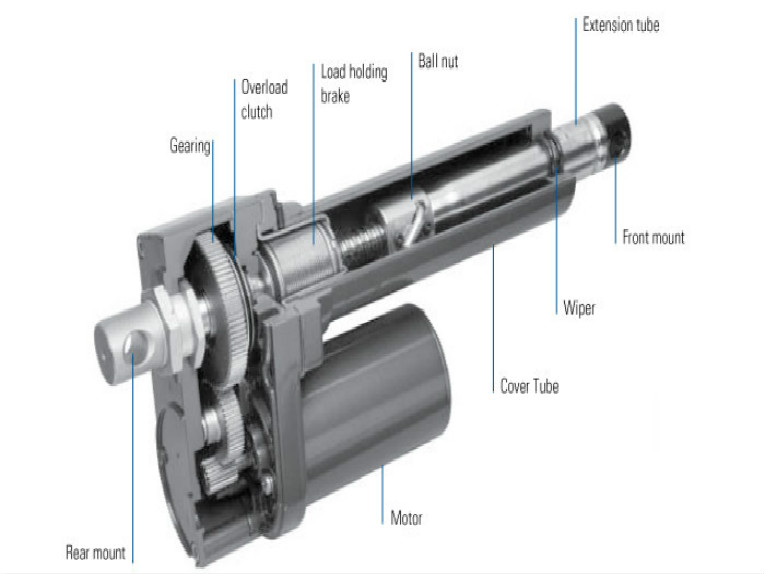
Askelmoottorin vääntömomentin lisääminen ilman rungon koon kasvattamista
Avain on pinottujen roottoreiden ja staattoreiden lisääminen, mutta fyysisesti pidemmän moottorin kanssa on elettävä. Askelmoottorit tarjoavat tarkan asennonsäädön ilman takaisinkytkentää, perinteisesti avoimen silmukan ohjausjärjestelmissä. Askelmoottorin akseli tekee normaalisti diskreettejä kulmaliikkeitä, jotka ovat olennaisesti...Lue lisää -
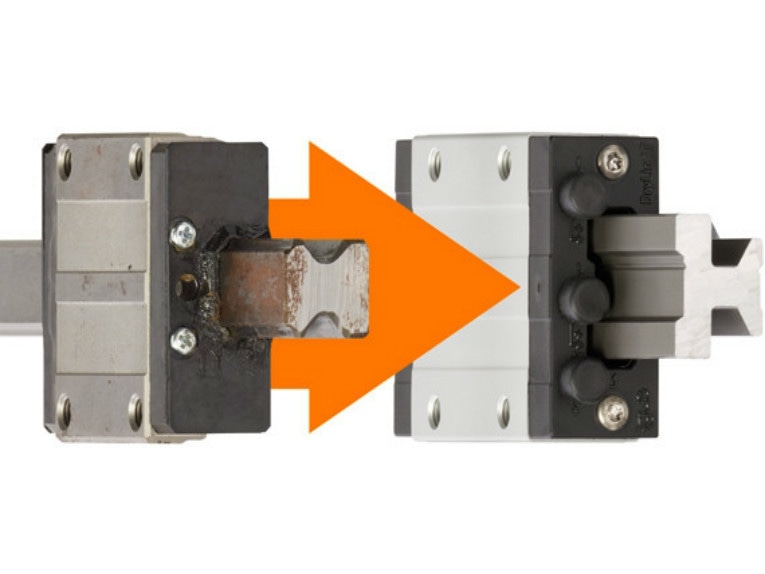
Korroosionkestävyyden vaihtoehtojesi ymmärtäminen
Lineaarilaakereiden valintoihin kuuluvat laakerimateriaali, pinnoitteet ja hankintalähde. Korroosio on hapettumisreaktio, joka vaikuttaa useimpiin metalleihin. Teräksen tapauksessa rauta hapettuu altistuessaan ilmalle ja vedelle muodostaen ruostetta, joka voi vähitellen tuhota materiaalia ajan myötä. Teräksen pinnat...Lue lisää -
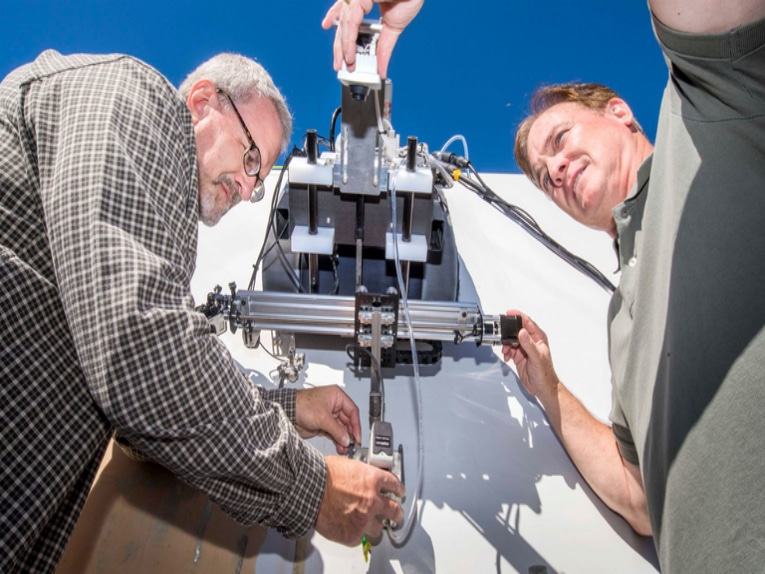
Ryömivät robotit ja lentävät droonit havaitsevat vaurioituneita tuuliturbiineja
Robotit, droonit ja anturit auttavat tarkastuksissa jo nyt ja ne voidaan automatisoida täysin lähitulevaisuudessa. Droonit ja ryömivärobotit, joissa on erityisskannerit, voisivat auttaa tuulivoimaloiden lapoja pysymään käytössä pidempään, mikä voisi alentaa tuulienergian hintaa aikana, jolloin lapojen käyttöikä kasvaa...Lue lisää -

Ensimmäisen teollisuusrobottisi valinta, ostaminen ja ohjelmointi
Muutamia nopeita vinkkejä, joiden avulla saat kaiken irti ensimmäisestä ostostasi. Robotit eivät petä. Kun valmistava yritys ostaa ensimmäisen teollisuusrobottinsa, se palaa yhä uudelleen ostamaan lisää tehtaidensa automatisointia varten. Koska robotit lisäävät tuottavuutta, ammatti...Lue lisää -
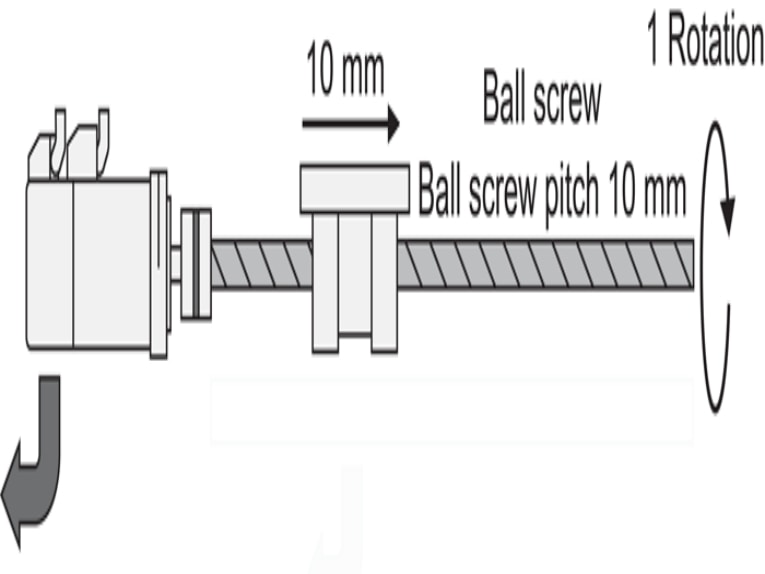
Pulssinohjauksen perusteet liikeohjauksessa
Automaatiokoneissa, jotka tarvitsevat vain kaksi tai kolme sähkökäyttöisten toimilaitteiden akselia, pulssilähdöt voivat olla yksinkertaisin tapa. PLC:n pulssilähtöjen käyttö on kustannustehokas tapa saada aikaan yksinkertaista liikettä. Useimmat, elleivät kaikki, PLC-valmistajat tarjoavat tavan ohjata servoja ja askelmoottoreita pu...Lue lisää -

1800N työntövoima 0,2 mm:n paikannustarkkuus sähköinen lineaaritoimilaite
Tasavirtamoottori Hiljainen muotoilu, ratkaisee meluongelman putterin käytön aikana. Metallivaihteisto Jauhemetallurgia, puhdasmetallivaihteisto, erittäin korkea lujuus, kaksinkertainen sitkeys. Ylä- ja alarajakytkin Teleskooppivarsi pysähtyy automaattisesti, kun se saavuttaa ylä- tai alarajan varmistaakseen, että...Lue lisää
