







-
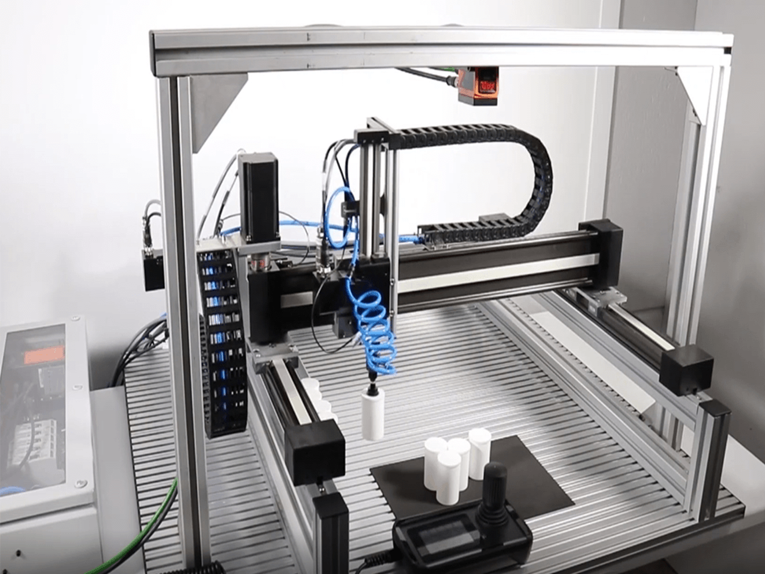
कस्टम लीनियर पोजिशनिंग सिस्टम का कार्यान्वयन कैसे करें?
पिछले लेख में, हमने प्रोग्राम डिज़ाइन चरण के महत्व और गैर-मानक डिज़ाइन के लिए फ़ुयु की अपनी प्रक्रिया विशिष्टताओं पर ध्यान केंद्रित किया था। तो योजना निर्धारित होने के बाद हम कार्यान्वयन कैसे करते हैं? सबसे पहले, आइए एक स्थिति की कल्पना करें, फ़ुयु की उत्पादन कार्यशाला में, आंतरिक...और पढ़ें -

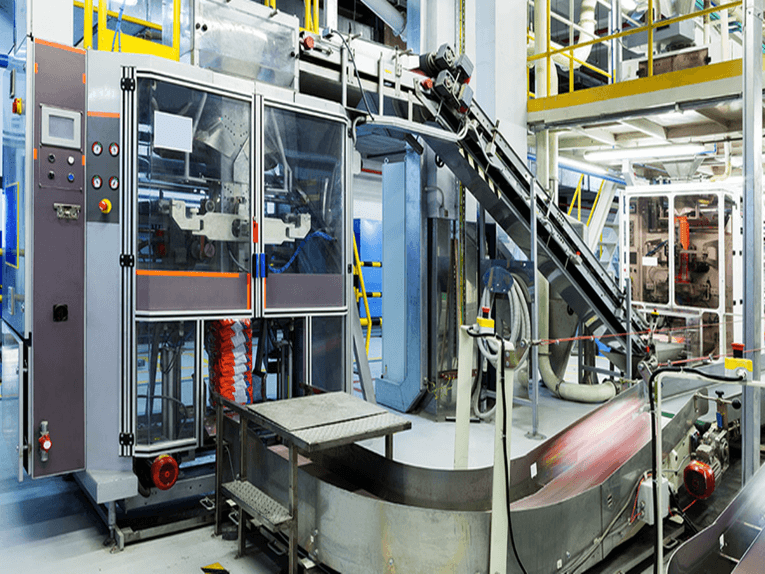
रेखीय गति प्रणालियों का आकार निर्धारण और चयन
“LOSTPED” कैसे मदद कर सकता है? पैकेजिंग और सामग्री प्रबंधन से लेकर सेमीकंडक्टर निर्माण और ऑटोमोटिव असेंबली तक, लगभग सभी विनिर्माण प्रक्रियाओं में किसी न किसी प्रकार की रैखिक गति शामिल होती है, और जैसे-जैसे निर्माता मॉड्यूलर रैखिक गति की लचीलता और सरलता से परिचित होते जाते हैं...और पढ़ें -

खतरे रहित रैखिक गति प्राप्त करना
हाइड्रोलिक सिलेंडरों की तुलना में इलेक्ट्रोमैकेनिकल एक्चुएटर्स की सुरक्षा संबंधी विशेषताएं। लीनियर मोशन मशीन डिज़ाइनर तेजी से इलेक्ट्रोमैकेनिकल एक्चुएटर्स का उपयोग कर रहे हैं क्योंकि ये हाइड्रोलिक सिलेंडरों की तुलना में अधिक स्वच्छ, नियंत्रित करने में आसान और कम रखरखाव की आवश्यकता वाले होते हैं। हालांकि, अक्सर कुछ बातों पर ध्यान नहीं दिया जाता है...और पढ़ें -
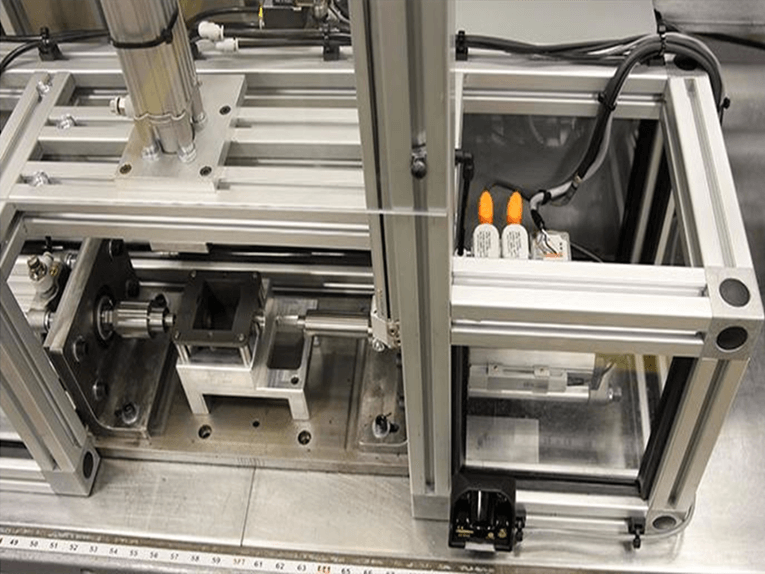
दो ड्राइव सटीक दोहरी गति प्रदान करते हैं
मापन और निरीक्षण उपकरणों में फोकस और स्कैन करने के लिए उपयोग किए जाने वाले अत्यधिक परिशुद्ध रैखिक स्थिति निर्धारण प्रणालियों को अक्सर दो अलग-अलग गति मोड की आवश्यकता होती है: एक तीव्र गति (100 मिमी/सेकंड) और उसके बाद एक धीमी गति (20 एनएम/सेकंड)। तीव्र गति से चलने का समय कम हो जाता है, जबकि धीमी गति से चलने से परिशुद्धता सुनिश्चित होती है।और पढ़ें -

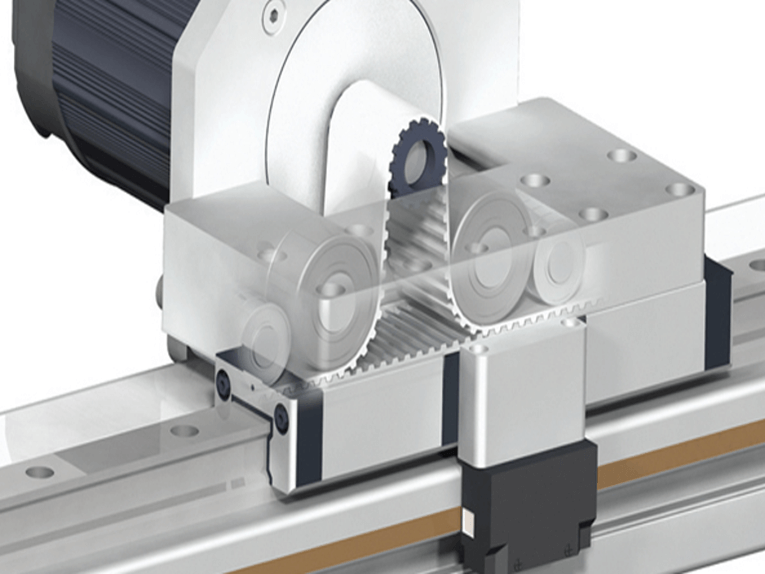
लीनियर पोजिशनिंग सिस्टम में टाइमिंग बेल्ट
बेल्ट और पुली पिच, बेल्ट की लंबाई और केंद्र दूरी। प्रबलित यूरेथेन टाइमिंग बेल्ट उच्च-सटीकता वाले रैखिक गति और परिवहन अनुप्रयोगों में अच्छा काम करते हैं क्योंकि वे बहुत कम खिंचते हैं, सरकते या फिसलते नहीं हैं, और नियोप्रीन की तुलना में बहुत अधिक कठोर होते हैं, जिसका अर्थ है दांतों का कम विक्षेपण। रैखिक गति में...और पढ़ें -
स्थिति निर्धारण नियंत्रण में विकास
शोधकर्ता रैखिक स्थिति निर्धारण प्रणालियों की सटीकता में सुधार करने, प्रतिघात को कम करने या समाप्त करने, साथ ही ऐसे उपकरणों को उपयोग में आसान बनाने के तरीकों की खोज में लगे हुए हैं। यहां हाल के घटनाक्रमों पर एक नज़र डालते हैं। चाहे आवश्यक रैखिक गति थोड़ी हो या अधिक, स्थिति निर्धारण की सटीकता और विश्वसनीयता...और पढ़ें -
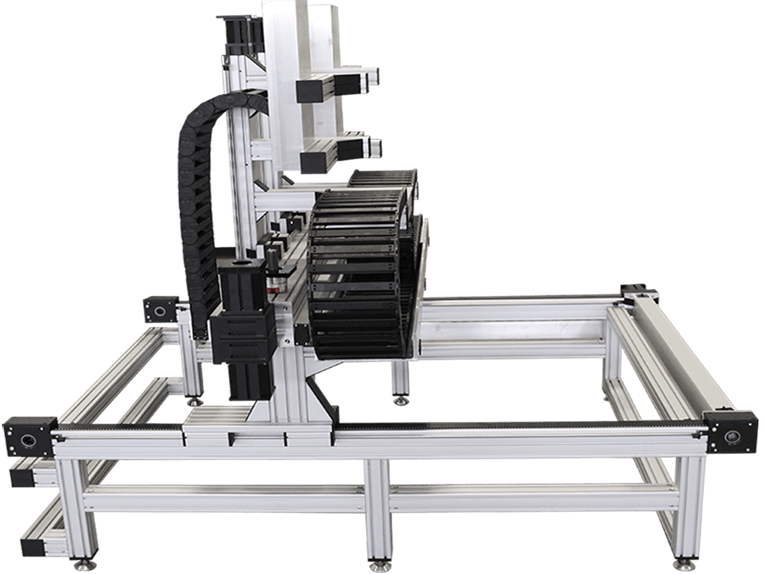
कस्टम डिज़ाइन लीनियर मोशन सिस्टम कौन सा है जो उपयोगकर्ताओं की आवश्यकताओं को सर्वोत्तम रूप से पूरा करता है?
गैर-मानक रैखिक स्थिति निर्धारण मॉड्यूल। फुयु के लिए, पहले से तैयार किए गए चित्र और संबंधित सामग्रियों वाले मानकीकृत मॉड्यूल को मॉड्यूलर उत्पाद माना जा सकता है। इसके विपरीत, मौजूदा मॉड्यूल पर आधारित अपेक्षाकृत बड़े डिज़ाइन परिवर्तनों वाले नए डिज़ाइनों को "गैर-मानक" माना जा सकता है।और पढ़ें -
उच्च परिशुद्धता वाले रैखिक स्थिति निर्धारण प्रणालियों के चयन के लिए सुझाव: भाग 3
स्टेज, ड्राइव और एनकोडर डिज़ाइन। आपके उच्च-सटीकता वाले पोजिशनिंग सिस्टम के घटक — बियरिंग, स्थिति-मापन प्रणाली, मोटर-और-ड्राइव प्रणाली, और नियंत्रक — को यथासंभव बेहतर ढंग से एक साथ काम करना चाहिए। भाग 1 में सिस्टम बेस और बियरिंग को शामिल किया गया था। भाग 2 में स्थिति मापन को शामिल किया गया है...और पढ़ें -
उच्च परिशुद्धता वाले रैखिक स्थिति निर्धारण प्रणालियों के चयन के लिए सुझाव: भाग 2
कोई भी एक प्रणाली सभी के लिए सही नहीं होती। आपकी उच्च-सटीकता स्थिति निर्धारण प्रणाली के घटक — आधार और बेयरिंग, स्थिति-मापन प्रणाली, मोटर और ड्राइव प्रणाली, और नियंत्रक — को यथासंभव एक साथ मिलकर काम करना चाहिए। भाग 1 में हमने सिस्टम के आधार और बेयरिंग के बारे में चर्चा की थी। यहाँ, हम स्थिति निर्धारण प्रणाली के बारे में चर्चा करेंगे...और पढ़ें -
उच्च परिशुद्धता वाले रैखिक स्थिति निर्धारण प्रणालियों के चयन के लिए सुझाव: भाग 1
इलेक्ट्रॉनिक, ऑप्टिक, कंप्यूटर, निरीक्षण, स्वचालन और लेजर उद्योगों को विभिन्न प्रकार की पोजिशनिंग सिस्टम विशिष्टताओं की आवश्यकता होती है। कोई भी एक सिस्टम सभी के लिए उपयुक्त नहीं है। यह सुनिश्चित करने के लिए कि एक उच्च-सटीकता वाली पोजिशनिंग सिस्टम सर्वोत्तम रूप से कार्य करे, सिस्टम के घटक - बियरिंग, स्थिति-मापन प्रणाली आदि - का सटीक चयन आवश्यक है।और पढ़ें -
आउटसोर्सिंग कब करें: प्लग-एंड-प्ले मोशन सबसिस्टम
मोशन एक्चुएटर्स और स्टेजेस को शुरू से बनाना डिजाइनरों को सैकड़ों पुर्जों को ऑर्डर करने, स्टॉक में रखने और असेंबल करने के लिए मजबूर करता है। इससे उत्पाद को बाजार में लाने का समय भी बढ़ जाता है और तकनीशियनों तथा विशेष उत्पादन उपकरणों की आवश्यकता होती है। इसका एक विकल्प है पहले से तैयार मोशन डिवाइस ऑर्डर करना। स्टेजेस और एक्चुएटर्स...और पढ़ें -

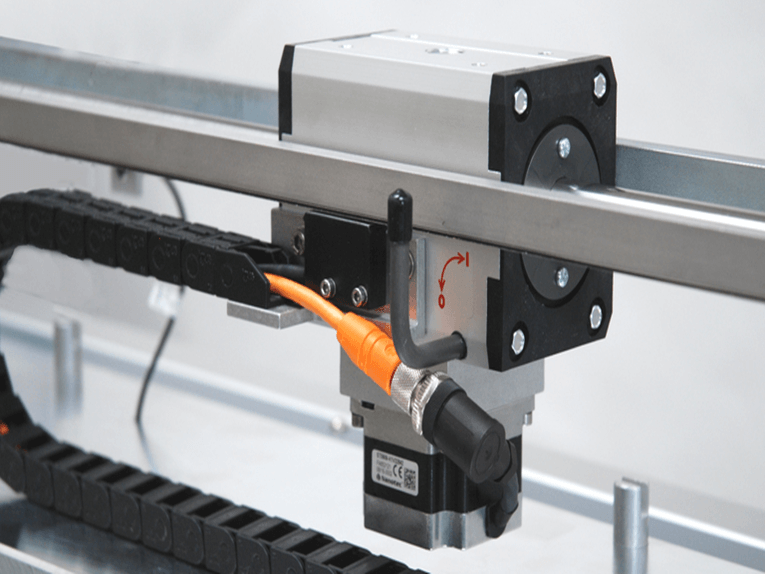
रेखीय गति का बेहतर नियंत्रण
सटीक स्वचालित स्थिति निर्धारण के लिए, स्टेपर-मोटर आधारित रैखिक एक्चुएटर्स पर विचार करें। रैखिक एक्चुएटर्स मूल रूप से एक सीधी रेखा में बल और गति उत्पन्न करते हैं। एक विशिष्ट यांत्रिक प्रणाली में, किसी उपकरण का आउटपुट शाफ्ट गियर, बेल्ट और पुली के माध्यम से रोटरी मोटर का उपयोग करके रैखिक गति प्रदान करता है...और पढ़ें
