








設計時間の短縮は、コスト削減と市場投入までの時間短縮につながるため、エンジニアリングにおいて非常に重要です。設計時間には、再設計、過剰設計、スコープクリープなど、付加価値のない活動が数多く含まれることがよくあります。これらの活動は、すべてのアプリケーション基準を徹底的に理解し、データ収集装置を用いたコンポーネント、モジュール、およびアセンブリ全体のパラメトリックテストによって計算と分析を検証し、テストによって予測された性能結果を実証することで最小限に抑えることができます。
設計プロセス全体、あるいは一部をやり直す必要がないよう、関連するアプリケーション情報はできるだけ初期段階で収集してください。スコープの変更には十分注意し、準備しておきましょう。理論的な計算と解析を用いて最適な初期設計を決定し、実際の機器における主要性能特性のテスト測定値と比較します。ベンチテストの結果は、実際の現場条件下でサイクルテストを実施することで確認します。
要件の特定
ほぼすべてのエンジニアリングプロセスにおいて、最初にして最も重要なステップは、アプリケーション要件を特定することです。各製品には、その性能に影響を与える独自の基準セットが存在する場合があります。チェックリストを使用することで、見落とされがちなパラメータを確実に考慮に入れることができます。
サンプルチェックリストに含まれる主要な申請情報データには、以下が含まれる場合があります。
・負荷/速度(動的および静的)
・電圧:12、24、36、48 VDC、110、220 VAC
・荷重の方向
・ストローク長
・寿命/使用サイクル
• 環境
・ストローク終端保護:クラッチ?リミットスイッチ?
・アクチュエータはどのように制御されますか?
• フィードバック
• CE認証
特定の用途に適したボールねじアセンブリを選定するには、最小サイズかつ最も費用対効果の高いソリューションを決定するために、反復的なプロセスが必要となる場合があります。設計荷重、線速度、および位置精度要件に基づいて、適切なボールねじアセンブリの直径、リード、および耐荷重が計算されます。その後、寿命、寸法上の制約、取り付け構成、および環境条件に基づいて、個々のボールねじ部品が選定されます。
まず、負荷の方向と大きさを定義することから始めましょう。システムの向きは非常に重要です。水平方向の場合、駆動負荷はペイロード重量に摩擦係数を掛けた値になります。垂直方向の場合、駆動負荷は重量に等しくなります。リニアベアリングやガイドに作用する負荷は、垂直負荷、水平負荷、ピッチ、ロール、ヨーのモーメント負荷、またはそれらの任意の組み合わせとなる可能性があります。負荷の大きさや方向も変化する場合があります。
各ベアリングにおける合成荷重ベクトルは、リニアベアリングシステムが受ける様々な荷重ベクトルの適切な組み合わせから算出する必要があります。システム全体の荷重ベクトルだけでは耐用年数を推定できないためです。各リニアベアリングにかかる荷重は、そのベアリングの等価荷重と呼ばれます。システムのサイズは、最も荷重の大きいベアリングのサイズに基づいて決定されます。等価荷重の計算方法の詳細については、リニアベアリングおよびガイドのサプライヤーのカタログを参照してください。
例えば、ボールねじアセンブリは、回転運動を軸方向運動に変換し、軸方向荷重を支えるように設計されています。圧縮荷重下でボールねじが座屈しない能力は、柱強度と呼ばれます。ねじには、ボールナット(その補完部品)にかかる荷重と実質的に大きさが等しく方向が逆の軸方向荷重がかかり、設計形状によって駆動モーターのトルクと関連付けられます。一般に、柱強度は設計上の制限パラメータとなります。なぜなら、長さが長くなると、柱強度は材料の実際の圧縮強度よりもはるかに低くなる可能性があるからです。自由長と直径の比率は柱の座屈と密接に関係しているため、特定の直径の場合、ボールねじの軸方向荷重容量は自由長に依存することがわかります。
直線運動システムの寿命は、その動作プロファイルに基づいて予測できます。つまり、ボールねじが1日に何時間、1週間に何日、1年に何週間稼働するかによって予測できます。より複雑な用途や、より精度の高い寿命予測を行うには、動きを基本的に直線セグメントに分解した、詳細かつ包括的な動作プロファイルを作成する必要があります。動作プロファイルの各セグメントには、セグメントの開始時と終了時の速度、セグメントの継続時間、およびセグメント中のトルクに関する情報が必要です。
ご使用の用途に必要な位置決め精度と再現性を確認してください。例えば、インチボールねじは通常、プレシジョンとプレシジョンプラスの2つのグレードで製造されます。プレシジョングレードのボールねじは、比較的粗い動きが求められる用途や、位置決めにリニアフィードバックを使用する用途で使用されます。プレシジョンプラスグレードのボールねじは、ミクロン単位の再現性のある位置決めが重要であり、リニアフィードバック装置を使用しない場合に使用されます。プレシジョングレードのねじは、ねじの有効長さ全体にわたって累積的なばらつきが大きくなりますが、プレシジョンプラスグレードのねじはリード誤差の蓄積を抑え、ねじの有効長さ全体にわたってより精密な位置決めを実現します。
サイズ選びと選択
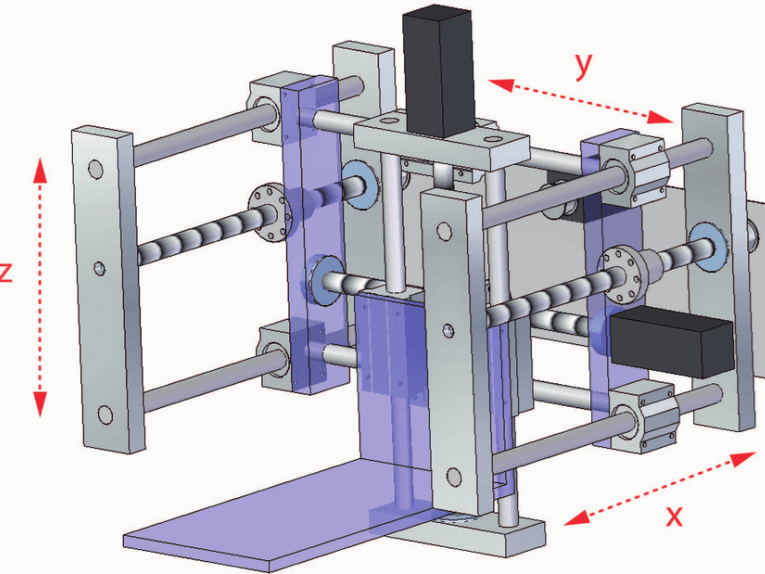
リニアモーションシステムサプライヤーが提供するチャートは、リニアモーションシステムの適切なサイズ選定と選択を効率的に行うための近道となります。ここでは、3軸溶接ガントリーアプリケーションを例に、カタログの計算式を使用してボールねじを選定・サイズ決定する方法を説明します。ボールねじはx軸の全長にわたって配置され、両端はベアリングサポートで支持されています。ここでは、簡略化のため、ナットの取り付けはフランジ付き、材質は合金鋼、ねじの方向は右ねじ、製品シリーズはメートルとします。このアプリケーションにおけるシステムの向きは水平で、ねじ駆動方式を採用しており、x軸の長さは6メートルです。熱安定性の高いフランジを備えた固定端を使用します。
プロファイルレール上を走行する台車により、2,668.9ニュートンの荷重が加えられます。移動距離は4.5メートル、支持されていない長さは5.818メートルです。必要な速度は毎秒0.1メートル、加速度は±2.5m/s²です。稼働サイクルは1日8時間、週5日、年間50週間で、平均サイクル数は1時間あたり10サイクルです。ボールねじの寿命要件は20年、その他の部品の寿命要件は5年です。電気工学科の希望により、ステッピングモーターを使用することも追加要件としてあります。
次に、X軸用のリニアベアリングを選定します。この用途における主な要件は、高い耐荷重性と高い剛性です。移動距離は5,500メートルと比較的長いですが、6メートル長のネジが利用できるため、突き合わせ接合は不要です。また、メンテナンスの手間が少ないことも重要な要件です。これらの要件を満たした結果、500シリーズのボールプロファイルレール式リニアガイドが選定されました。
この選択を行うことで、ボールねじにかかる荷重を計算できます。この荷重に基づいて、1610ボールナットを起点として選択します。このボールナットは、一体型フランジ、一体型ワイパー、およびM4取り付け部を備えています。ボールねじの精度は±50μm/300mmです。
次に、耐用年数要件を確認します。耐用年数は通常L10で評価され、これはボールねじの90%がまだ正常に機能する時間を表します。この用途では、耐用年数は10kmです。耐用年数がこれほど長い理由は、耐用年数ではなく、臨界速度に基づいてボールねじを選定したためです。
提案された設計のテスト
計算に基づいて設計を選択したら、前提が正しいことを確認するためにテストを行う必要があります。テストは、提案されたものが実際に納品されたことを検証し、そうでない場合は必要な是正措置を導くために設計されています。検証テストは、次のような質問に答えるように設計する必要があります。
・完成品は設計仕様を満たしていますか?
・実験上の限界内で、性能は理論計算と一致しているか。一致しない場合は、どの程度異なり、その理由は何か。
・この製品は、求められるレベルの信頼性を提供しますか?
・製品の潜在的な故障モードと故障箇所は何ですか?
・現在の解決策は、他の選択肢と比べてどうですか?
大型システムや機械の場合、まず部品テストを行い、次にサブアセンブリのベンチテスト、そして最後に完成品のテストへと進むのが良いでしょう。各テスト段階では、テスト結果をレビューし、理論計算と比較することで、設計が正しい方向に向かっているか、あるいは改善の余地があるかどうかを検討する必要があります。テストの目的は、計算やモデリングで見落としていた可能性のある点を明らかにすることです。
構成済みリニアモーションシステム
また、プロセス全体を通して、独自の設計・組み立てを行うよりも、構成済みのリニアモーションシステムを購入する方が理にかなっているかどうかを検討することも重要です。この場合、取り付け構成、位置決め要件、環境条件、負荷条件、動作要件、その他の特別な考慮事項など、アプリケーションの要件をリニアモーションインテグレーターに提供します。インテグレーターは通常、Webベースのサイジングおよび選択システムを使用して、入力された情報に基づいてカスタムリニアモーションシステムを設計および構成します。インテグレーターは、依頼から24時間以内に見積もりと提案設計のCADファイルを提供できる場合がほとんどです。このようなシステムのコストは、ほとんどの場合、個々のコンポーネントのコストよりも低くなります。
このアプローチにより、設計時間と組み立てコストを通常90%以上削減でき、材料費も20~30%削減できる場合が多くあります。最も重要なのは、直線運動システムの設計に費やす時間を短縮することで、エンジニアが本来の専門分野以外の作業に費やす時間を減らし、得意とするシステム全体の統合に集中できる時間を増やすことができる点です。
要約すると、設計時間を節約するために、あらゆる有用なリソースを活用しましょう。リニアモーションベンダーが提供する構成済みのリニアモーションアセンブリは、エンジニアリングおよび組み立てコストの削減に役立つため、見逃さないでください。コンポーネント、モジュール、完成システムといった選択肢を、設計および組み立て時間への影響という観点から評価しましょう。チャート、数式、オンライン選択システム、3Dモデルなど、利用可能なすべての設計ツールを有効活用してください。最後に、標準、改良標準、特殊ソリューションに関する製品知識を活用するために、テクニカルサポートにご相談ください。ベンダーが設計上の主張や設計方針を裏付ける設計検証/テスト/分析データを持っていることを必ず確認してください。このアプローチにより、設計時間を最小限に抑えつつ、リニアモーションシステムが性能と耐久性の要件を満たすことを保証できます。
投稿日時:2025年11月25日