








Гидравлические системы обладают длительным сроком службы, но они менее эффективны, чем электрические. Электрические системы также обеспечивают точное управление положением, скоростью и частотой вращения, а также более эффективную работу. Они работают в замкнутом контуре, что упрощает сбор данных, и практически не требуют технического обслуживания.
Фактически, по мере того как электрические штоковые приводы становятся способными создавать усилия, сопоставимые с усилиями высококлассных гидравлических систем, они будут становиться все более жизнеспособной заменой гидравлическим системам во многих областях применения. Оценка возможностей и ограничений, а также их соответствие целям и задачам системы помогут определить оптимальный выбор для конкретного применения.
На протяжении десятилетий гидравлические цилиндры оставались единственной жизнеспособной технологией для работы с высокими нагрузками. Гидравлика надежна и относительно проста в применении, а также обеспечивает более низкую стоимость единицы силы. Неудивительно, что гидравлические цилиндры стали...де-фактоПодходит для привода практически любых тяжелых объектов, которые необходимо перемещать по прямой линии, быстро или медленно, вверх или вниз… включая прессы для металла, конвейерные ленты, краны, пилы и многое другое.
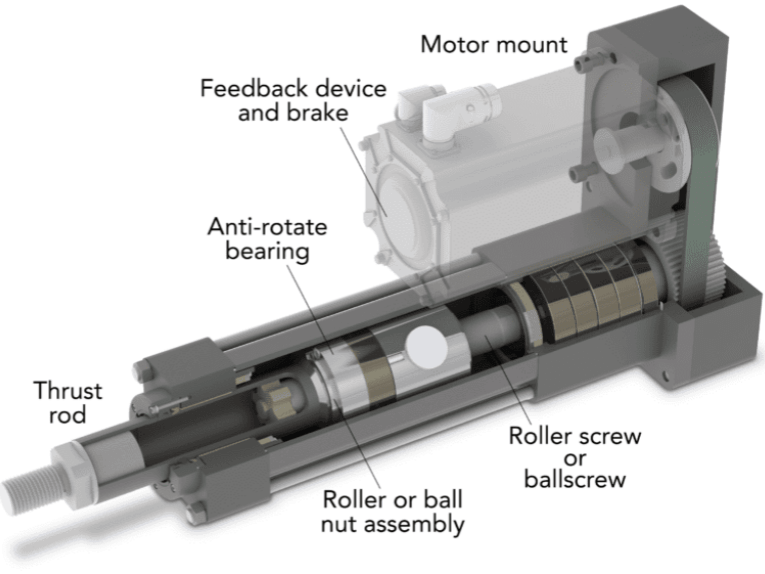
Электроприводы с тягами (иногда называемые электрическими цилиндрами) — это новейшая технология привода, предлагающая альтернативу гидравлике. Электрические приводы сравнительно более гибкие, точные и надежные, с постоянно растущей мощностью.
Понимание преимуществ электрических систем перед гидравлическими поможет определить оптимальный вариант для конкретного применения. Кроме того, знание нескольких важных советов по переоборудованию обеспечит успешный переход от гидравлического к электрическому приводу.
Гидравлика: устаревшая технология с некоторыми недостатками.
Операторы знают, как поддерживать свои гидравлические машины в рабочем состоянии. Тем не менее, существуют проблемы и недостатки. В случае с гидравликой вопрос не в том, произойдет ли утечка или поломка, а в том, когда это случится. Очистка — грязный и трудоемкий процесс. Возможно, придется выбрасывать производственные детали или продукцию. Гидравлические системы также требуют сравнительно большой площади для компрессора, а также регулярного технического обслуживания и ручной переналадки. Кроме того, гидравлические системы шумят, могут быть подвержены колебаниям температуры, не обладают точными возможностями многопозиционного управления и работают в разомкнутом контуре, что усложняет сбор данных для использования системами управления машиной.
Электрические приводы для улучшения управления движением
Основная причина, по которой инженеры выбирают систему электрических приводов вместо системы гидравлических цилиндров, заключается в гибкости ее возможностей управления движением:
1. Позиционный контроль — точное позиционирование в нескольких положениях.
2. Контроль скорости
3. Контроль ускорения и замедления
4. Точное управление выходной силой
5. Сложная система оперативного управления всеми этими параметрами движения.
Электрические приводы в сочетании с сервоприводом и моторным двигателем обеспечивают бесступенчатый контроль положения… а точность и повторяемость значительно превосходят показатели гидравлических систем.
Стандартные гидравлические системы превосходно справляются с позиционированием по всей длине цилиндра, но позиционирование в середине хода с использованием этих цилиндров сложнее и требует наличия регулирующего клапана и помощи оператора. Позиционирование в середине хода осуществляется в режиме разомкнутого контура и требует от оператора определения приемлемого положения. Более того, регулирование скорости контролируется через регулирующий клапан, и оператору снова необходимо установить приемлемую скорость для конкретного применения… хотя достижение точной настройки скорости часто бывает затруднительным.
После регулировки скорости, требуемое усилие на выходе гидравлического цилиндра регулируется через клапан давления. Как правило, для этого оператору необходимо точно установить целевое усилие. Более того, повторяемость положения, скорости и усилия гидравлического цилиндра ухудшается из-за износа уплотнений, утечек, падения давления и скачков, вызванных работой насоса, а также других факторов, связанных с техническим обслуживанием. Трудно добиться повторяемости результатов изо дня в день или из месяца в месяц (тем более из года в год) в производственных условиях, где качество и вязкость масла колеблются в зависимости от температуры. Поэтому для достижения целевого уровня производительности требуется постоянное вмешательство оператора.
Сервоприводное управление скоростью обеспечивает высокую точность.
Дополнительные преимущества электрических приводов достигаются при их сочетании с системами сервоуправления. Сервоконтроллеры, способные управлять несколькими осями, легко доступны в готовом виде. Контроллеры и электрические приводы могут быть легко (и экономично) скоординированы в сложных многоосевых конфигурациях. Скорость одного или нескольких электрических приводов точно и непрерывно контролируется — и может легко плавно переходить от одной скорости к другой без остановки или выхода за пределы целевых положений.
Кроме того, сервоуправление ускорением и замедлением предотвращает резкие удары электроприводов о жесткие упоры или срабатывание рывков. Это, в свою очередь, снижает нагрузку на элементы рамы машины и необходимость в избыточном проектировании конструкций для противостояния ударным нагрузкам. Все движения будут плавными, что позволит электроприводам обеспечивать плавное движение в критически важных процессах, где вибрации машины недопустимы или могут ограничивать скорость процесса.
В сервосистемах выходная сила привода регулируется посредством тока, подаваемого в серводвигатель. Поскольку сервоконтроллеры обеспечивают точное управление током, почти все электрические приводы обеспечивают точное и воспроизводимое управление выходной силой в рабочей точке.
Еще одной важной особенностью электрических приводов является их способность обеспечивать программируемое управление всеми параметрами профиля движения. В результате, единственное взаимодействие с оператором, необходимое для этого, — это время проектирования на этапе u-front для закладки целевых параметров производительности в программную среду ПЛК или другого контроллера. После установки режим работы повторяется изо дня в день, из месяца в месяц и из года в год. Экраны человеко-машинного интерфейса (HMI) на оборудовании могут отображать (и позволять регулировать) положение, скорость, силу, ускорение и замедление в любое время, обеспечивая максимальную гибкость работы машины.
Дата публикации: 27 мая 2026 г.