








Hidrolik sistemler uzun bir kullanım ömrü sunar, ancak elektrikli sistemler kadar verimli değildirler. Elektrikli sistemler ayrıca daha verimli çalışma ile hassas konum, hız ve debi kontrolü sağlar. Kolay veri toplama için kapalı devre bir ortamda çalışırlar ve neredeyse hiç bakım gerektirmezler.
Aslında, elektrikli çubuk tipi aktüatörler, üst düzey hidrolik sistemlerle karşılaştırılabilir kuvvetler üretebilme yeteneğine sahip oldukça, birçok uygulamada hidrolik sistemlerin yerini alabilecek daha uygun alternatifler haline geleceklerdir. Yetenekleri ve sınırlamaları değerlendirmek ve bunları sistem hedefleri ve amaçlarıyla uyumlu hale getirmek, uygulama için en iyi seçeneği belirlemeye yardımcı olacaktır.
On yıllardır, hidrolik silindirler yüksek kuvvet gerektiren uygulamalar için tek geçerli teknoloji olmuştur. Hidrolik sistemler sağlamdır ve kurulumu nispeten basittir; ayrıca kuvvet birimi başına daha düşük maliyet sağlarlar. Hidrolik silindirlerin bu kadar uzun süredir tercih edilmesi şaşırtıcı değil.fiilenİster hızlı ister yavaş, ister yukarı ister aşağı, düz bir hat üzerinde hareket ettirilmesi gereken hemen hemen her türlü ağır nesneyi çalıştırmak için ideal bir seçenek... Metal presler, konveyör bantları, vinçler, testereler ve daha birçokları dahil.
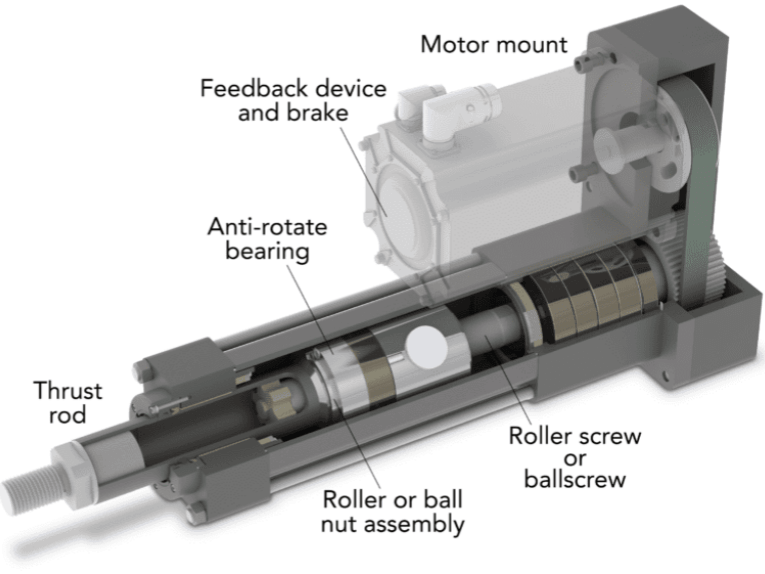
Elektrikli çubuk aktüatörler (bazen elektrikli silindirler olarak da adlandırılır), hidrolik sistemlere alternatif sunan en yeni hareket teknolojisidir. Elektrikli aktüatörler, sürekli artan kuvvet kapasiteleriyle karşılaştırıldığında daha esnek, hassas ve güvenilirdir.
Elektrikli sistemlerin hidrolik sistemlere göre avantajlarını anlamak, bir uygulama için en iyi seçeneği belirlemeye yardımcı olacaktır. Ayrıca, dönüşüm için birkaç önemli ipucunu anlamak, hidrolik sistemden elektrikli sisteme başarılı bir geçişi sağlayacaktır.
Hidrolik: Bazı dezavantajları olan eski bir teknoloji
Operatörler hidrolik makinelerinin nasıl çalışır durumda tutulacağını bilirler. Yine de zorluklar ve dezavantajlar vardır. Hidrolik sistemlerde sızıntı veya arıza olup olmayacağı değil, ne zaman olacağı söz konusudur. Temizlik zahmetli ve zaman alıcıdır. Üretim parçaları veya ürünler hurdaya çıkarılmak zorunda kalabilir. Hidrolik sistemler ayrıca kompresör için nispeten büyük bir alan gerektirir ve düzenli bakım ve manuel geçiş gerektirir. Ayrıca, hidrolik sistemler gürültülüdür, sıcaklık dalgalanmalarına karşı hassastır, doğru çok konumlu yeteneklere sahip değildir ve açık döngüde çalışır; bu da makine kontrolleri tarafından kullanılacak veri toplamayı zorlaştırır.
Geliştirilmiş hareket kontrolü için elektrikli aktüatörler
Mühendislerin hidrolik silindir sistemine kıyasla elektrikli aktüatör sistemini tercih etmelerinin temel nedeni, hareket kontrol yeteneklerinin esnekliğidir:
1. Konum kontrolü — birden fazla konuma hassas bir şekilde konum belirleme
2. Hız kontrolü
3. Hızlanma ve yavaşlamanın kontrolü
4. Çıkış kuvvetinin hassas kontrolü
5. Tüm bu hareket değişkenlerinin gelişmiş, anlık kontrolü.
Servo sürücü ve motor sistemiyle birleştirilmiş elektrikli aktüatörler, konum üzerinde sonsuz kontrol imkanı sağlar... ve doğruluk ve tekrarlanabilirlik, hidrolik sistemlerin çok ötesindedir.
Standart hidrolik sistemler uçtan uca konumlandırma uygulamalarında mükemmeldir, ancak bu silindirlerle orta strok konumlandırması daha karmaşıktır ve bir kontrol vanası ile operatör yardımını gerektirir. Orta strok konumlandırması açık döngülüdür ve operatörün hangi konumun kabul edilebilir olduğuna karar vermesini gerektirir. Dahası, hız kontrolü bir kontrol vanası aracılığıyla izlenir ve yine operatörün uygulama için kabul edilebilir hızı ayarlamasını gerektirir… ancak tam bir hız ayarına ulaşmak genellikle zordur.
Hız ayarı yapıldıktan sonra, hidrolik silindirden gereken basınç kuvveti çıkışı basınç valfi aracılığıyla düzenlenir. Bu da genellikle operatörün hedef kuvveti ayarlamasını gerektirir. Dahası, hidrolik silindirin konum, hız ve kuvvet tekrarlanabilirliği, aşınmış contalar, sızıntılar, basınç düşüşleri ve pompa kaynaklı ani basınç artışları ile diğer bakım ile ilgili faktörler nedeniyle bozulur. Yağ kalitesi ve viskozitesinin sıcaklıkla dalgalandığı üretim ortamlarında günlük veya aylık (hatta yıllık) tekrarlanabilir performans elde etmek zordur. Bu nedenle, hedef performans seviyesine ulaşmak sürekli operatör müdahalesini gerektirir.
Servo sınıfı hız kontrolü doğrudur.
Elektrikli aktüatörlerin servo kontrol sistemleriyle birleştirilmesinin faydaları daha da artmaktadır. Birden fazla ekseni kontrol edebilen servo kontrol üniteleri, piyasada kolayca bulunabilen hazır bileşenlerdir. Kontrol üniteleri ve elektrikli aktüatörler, karmaşık çok eksenli konfigürasyonlarda kolayca (ve uygun maliyetle) koordine edilebilir. Bir veya birden fazla elektrikli aktüatörün hızı hassas ve sürekli olarak kontrol edilir ve hedef konumları durmadan veya aşmadan bir hızdan diğerine kolayca geçiş yapabilir.
Ek olarak, hızlanma ve yavaşlamanın servo kontrolü, elektrikli aktüatörlerin sert duruşlara çarpmasını veya ani hareketlere geçmesini önler. Bu da makine gövde elemanları üzerindeki stresi ve şok yüklerine dayanacak şekilde yapıları aşırı tasarlama ihtiyacını ortadan kaldırır. Tüm hareketler pürüzsüz olacak ve elektrikli aktüatörlerin, makine titreşimlerinin kabul edilemez olduğu veya işlem hızını sınırlayabileceği kritik süreçlere düzgün hareket kazandırmasına olanak tanıyacaktır.
Servo sistemlerde, aktüatör çıkış kuvveti servomotora giren akım aracılığıyla kontrol edilir. Servo kontrolörleri akım üzerinde hassas kontrol sağladığı için, neredeyse tüm elektrikli aktüatörler çalışma noktasında kuvvet çıkışının doğru ve tekrarlanabilir kontrolünü sağlar.
Elektrikli aktüatörlerin bir diğer önemli özelliği, tüm hareket profili değişkenlerinin programlanabilir kontrolünü sağlama yetenekleridir. Sonuç olarak, operatörün yapması gereken tek müdahale, hedef performans değişkenlerini bir PLC veya diğer kontrol cihazının programlama ortamına entegre etmek için gereken ön tasarım süresidir. Bir kez ayarlandıktan sonra, işlem günden güne, aydan aya ve yıldan yıla tekrarlanır. Ekipman üzerindeki insan makine arayüzü (HMI) ekranları, maksimum makine esnekliği için konum, hız, kuvvet, ivme ve yavaşlamayı her zaman görüntüleyebilir (ve ayarlanmasına olanak tanır).
Yayın tarihi: 27 Mayıs 2026