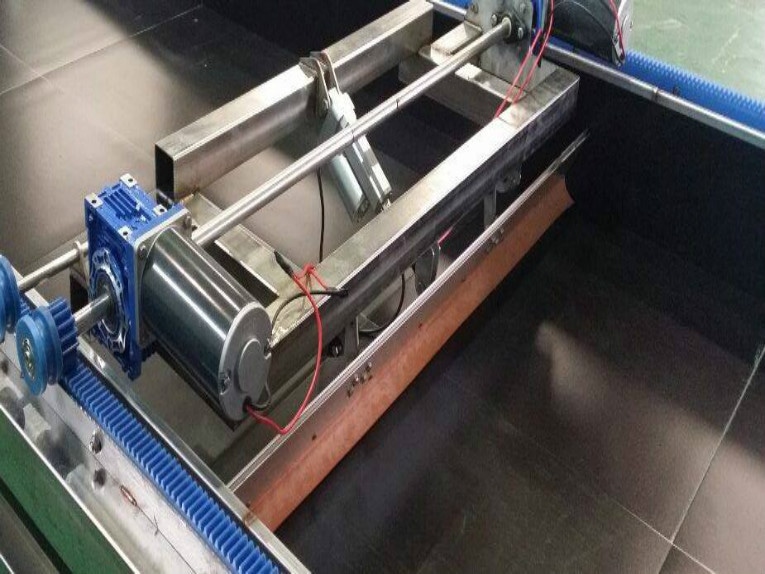
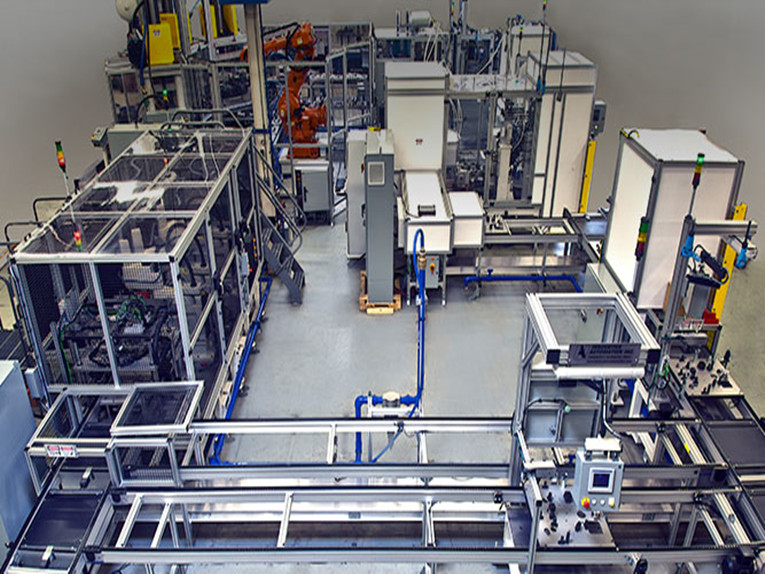
يُظهر الشكل هنا بيئة نموذجية ملوثة. غالبًا ما يصعب الحصول على حركة موثوقة عندما تكون بيئة التشغيل ملوثة بشدة بالحطام، أو تحتوي على ظروف قاسية مثل نطاق واسع من درجات الحرارة أو عوامل بيئية أخرى. استخدام الآلات في العمليات...
قطر البرغي، أو طوله، أو ترتيب محامل النهاية. وكما هو الحال مع العديد من المصطلحات المستخدمة في صناعة الحركة الخطية - مثل "الخدمة الشاقة" و"الصغير" و"المقاوم للتآكل" على سبيل المثال لا الحصر - لا يوجد معيار صناعي يحدد ما يشكل مشغلًا خطيًا "عالي السرعة". ومع ذلك، هناك بعض...
تُصنع المحركات الخطية على شكل حرف U بقاعدة فولاذية مقذوفة. ورغم عدم وجود معايير صناعية تُحدد المحركات الخطية والمراحل الخطية، فإن المصطلحات المتعارف عليها تشير إلى أن المحرك الخطي يُصنع عادةً بقاعدة أو مقطع من الألومنيوم، بينما...
يُقصد بالشد المناسب للأحزمة المتزامنة الشد الذي ينقل عنده الحزام الطاقة المطلوبة دون حدوث تعشيق غير منتظم عند تعرض نظام القيادة لحمل كامل. تستخدم الأحزمة المتزامنة (المعروفة أيضًا بالأحزمة المسننة أو أحزمة التوقيت أو أحزمة عزم الدوران العالي) أسنانًا مُشكّلة تتعشق مع بكرة...
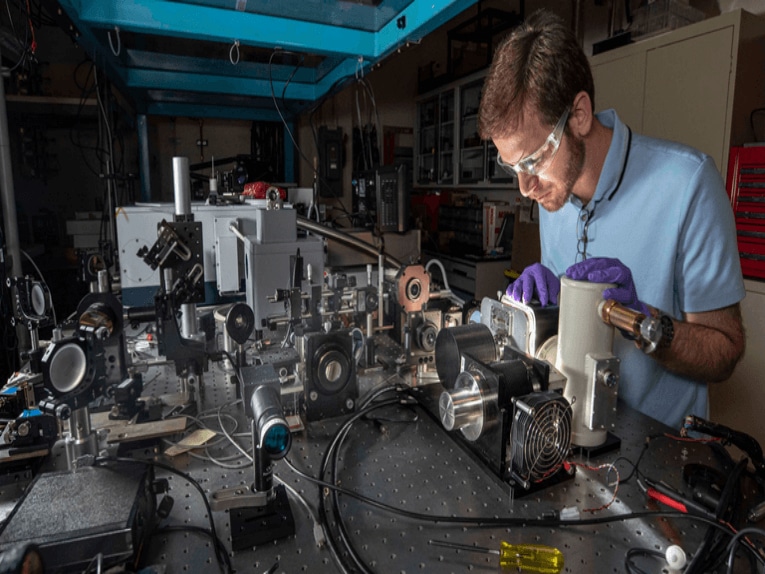
الهيكل، والمكونات، والأسلاك الإلكترونية، وسهولة الصيانة. إن الجمع بين الهندسة الميكانيكية والكهربائية والبرمجية وهندسة التحكم ليس بالأمر السهل. ولكن دمج التطورات التكنولوجية، والتركيز على هذه المجالات الخمسة، يمكن أن يبسط العملية ويضمن سهولة استخدام الميكاترونيك.
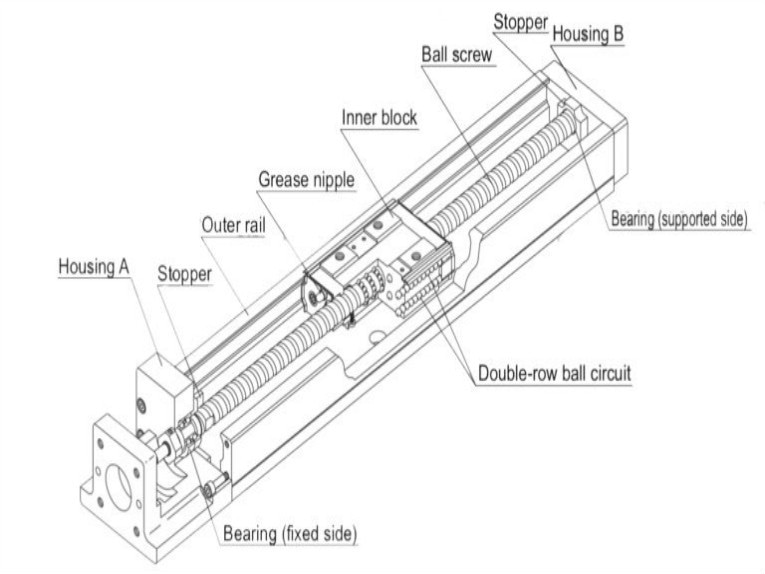
تُعدّ أدلة الكرات والأسطوانات الدوارة، خاصةً للتطبيقات التي تتطلب الامتثال لمعايير إدارة الغذاء والدواء الأمريكية أو وزارة الزراعة الأمريكية، العمود الفقري للعديد من عمليات وآلات الأتمتة، وذلك بفضل دقة تشغيلها العالية وصلابتها الجيدة وقدراتها الممتازة على تحمل الأحمال - وهي خصائص أصبحت ممكنة بفضل استخدام مواد عالية...
التصميم النموذجي لنظام الحركة: تُعد الحركة الخطية أساسية في العديد من الآلات المتحركة، ويمكن لطبيعة الدفع المباشر للمحركات الخطية تبسيط تصميم الآلة بشكل عام في هذه التطبيقات. تشمل المزايا الأخرى تحسين الصلابة، لأن المحركات الخطية مثبتة مباشرة على الحمل.
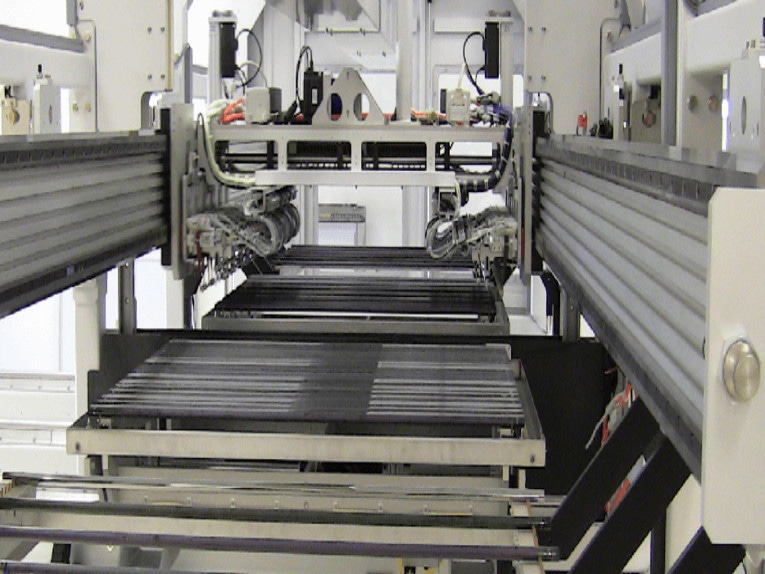
الحصول على دقة عالية وقابلية تكرار ممتازة من خطوط الإنتاج: حتى وقت قريب، كان الحصول على دقة عالية وقابلية تكرار ممتازة من خطوط الإنتاج أمرًا صعبًا. ولكن الآن، تعمل أنظمة الأتمتة الجديدة على إزالة العوائق المرتبطة بالمعالجة اليدوية وتجميع المنتجات عالية الجودة. هنا...
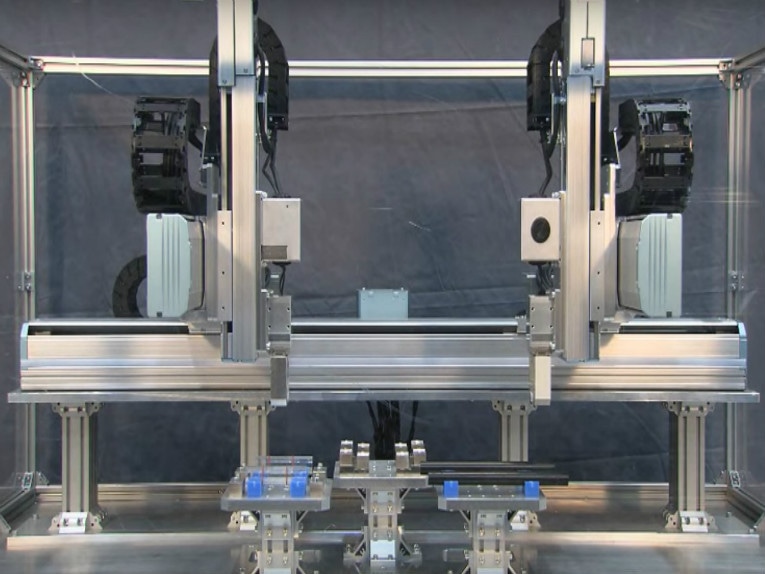
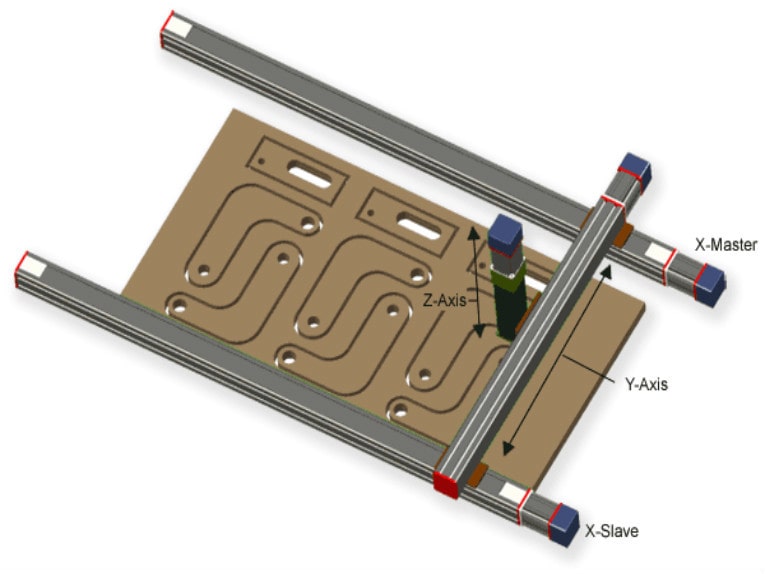
وكيف يمكن تجنب ذلك؟ تختلف الرافعات الجسرية عن أنواع الأنظمة متعددة المحاور الأخرى (مثل الروبوتات الكارتيزية وطاولات XY) باستخدام محورين أساسيين (X) متوازيين، مع محور عمودي (Y) يربط بينهما. يوفر هذا الترتيب المزدوج للمحور X قاعدة واسعة ومستقرة، ويسمح بـ...
يعني التزامن سرعة أكبر وعمرًا أطول. تُستخدم الأحزمة المتزامنة بكثرة في أنظمة الحركة، إذ توفر تشغيلًا أكثر سلاسة وأداءً أفضل عند السرعات العالية مقارنةً بالسلاسل، كما أنها تتجنب مشاكل الانزلاق والتمدد التي قد تُصيب الأحزمة على شكل حرف V في التطبيقات الدقيقة. لكن من عيوب الأحزمة المتزامنة...
احرص على تجنب أسباب تلف المحامل. لا أحد يرغب في تلف المحمل الخطي قبل الأوان. في حين أن العديد من العوامل قد تهدد العمر الافتراضي للمحمل، يجب على مصممي الآلات الصناعية توخي الحذر بشكل خاص من أخطاء المحاذاة بين قضبان المحمل والعناصر المتحركة. ليس فقط عدم المحاذاة...
المحركات الرئيسية: تُعدّ المحركات الرئيسية في الغالب محركات كهربائية متزامنة وغير متزامنة، تعمل بنظام تحكم مغلق الحلقة. تشمل تطبيقاتها المحركات المُجمّعة أو المُغلّفة للاستخدام في آلات الخراطة والطحن والتجليخ، بالإضافة إلى مراكز التشغيل. أما محركات المغزل التقليدية ذات المحركات المُغلّفة، فهي...