







-
Mikä on lineaarinen vaihe?
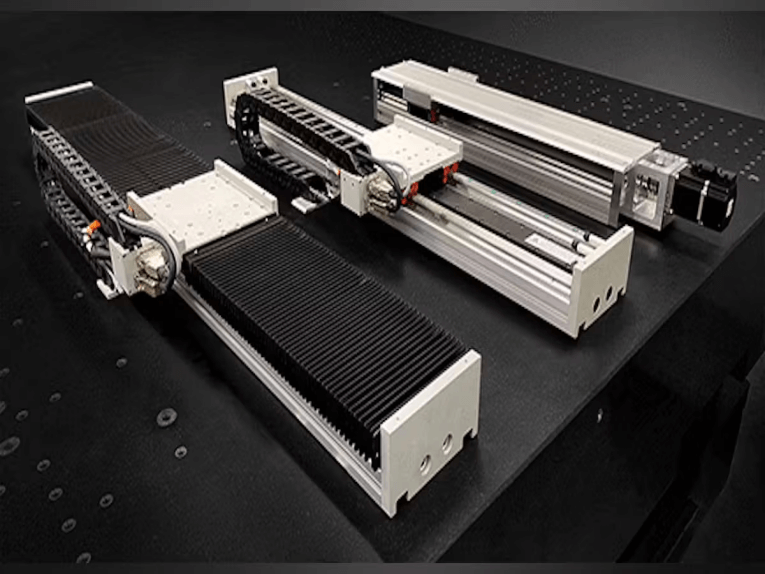
Lineaarinen alusta vakauttaa liikeakselin liikutettavalle esineelle, jota liikejärjestelmä liikuttaa. Tuotettu liukuva liike on saanut jotkut kutsumaan laitetta lineaariseksi liukumäeksi, joka on alustan lineaarista liikettä kantava komponentti. Lineaarisen eli siirtymäalustan osiin kuuluu...Lue lisää -

Korkean tarkkuuden lineaarimoottorivaiheet teollisuusautomaatioon
Tarkkuusteollisuuden liikejärjestelmiä käytetään esimerkiksi erittäin tarkkojen ja arvokkaiden komponenttien testauksessa, kokoonpanossa tai lasermikrokoneistuksessa sekä elektroniikassa, optiikassa ja fotoniikan valmistuksessa. Ottaen huomioon, että jokaisessa Yhdysvalloissa myytävässä modernissa autossa on ainakin yksi kamera...Lue lisää -
Johdatus Plug-and-Play-lineaariliikejärjestelmiin
Jos rakennat koneita, työskentelet todennäköisesti toimilaitteiden ja paikannusvaiheiden kanssa joka päivä. Mutta saatko todella näistä liikelaitteista parhaan suorituskyvyn tai alhaisimmat omistuskustannukset? Vastaus ei välttämättä ole se, mitä odotat. Liian usein insinöörit ajattelevat vaiheita tai toimilaitteita vain yhtenä ...Lue lisää -

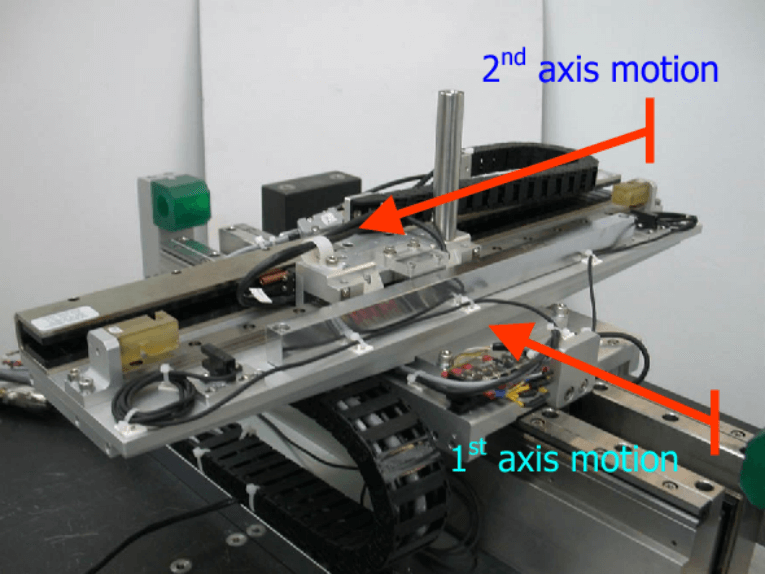
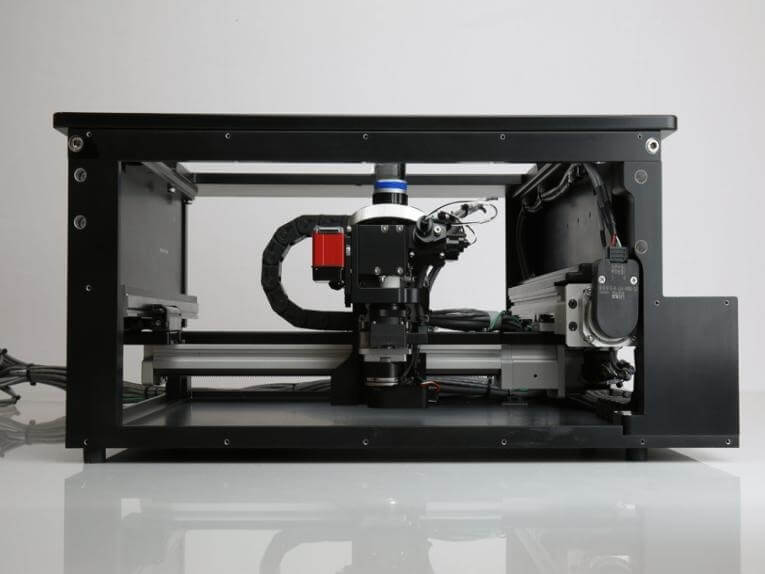
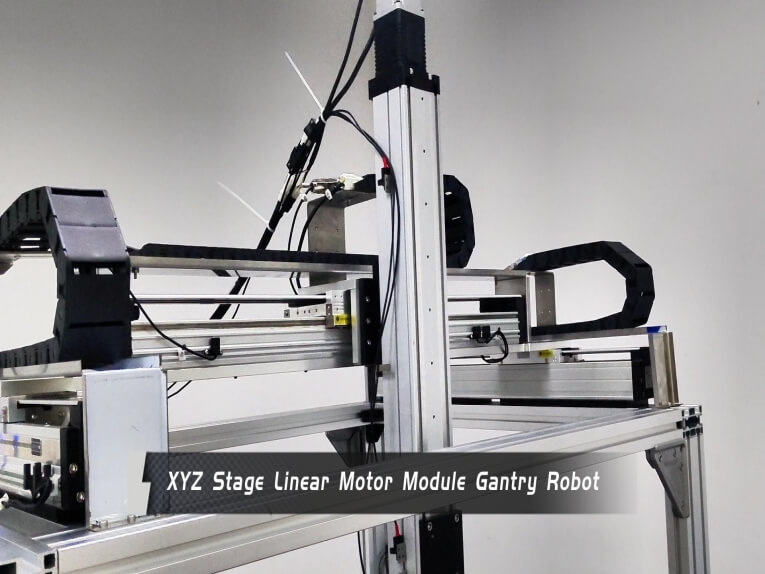
Mikä on XYZ-lineaarirobotti?
Karteesista koordinaatistoa käyttävää robottia kutsutaan myös suoraviivaiseksi robotiksi tai pallomaiseksi XYZ-robotiksi, koska se on varustettu kolmella liukunivelellä XYZ-akseleiden kokoamiseksi. Karteesista koordinaatistoa käyttävän robotin varren liikettä voidaan kuvata kolmella leikkaavalla...Lue lisää -
Liikkeenohjauksen mullistaminen lineaarimoottoreilla
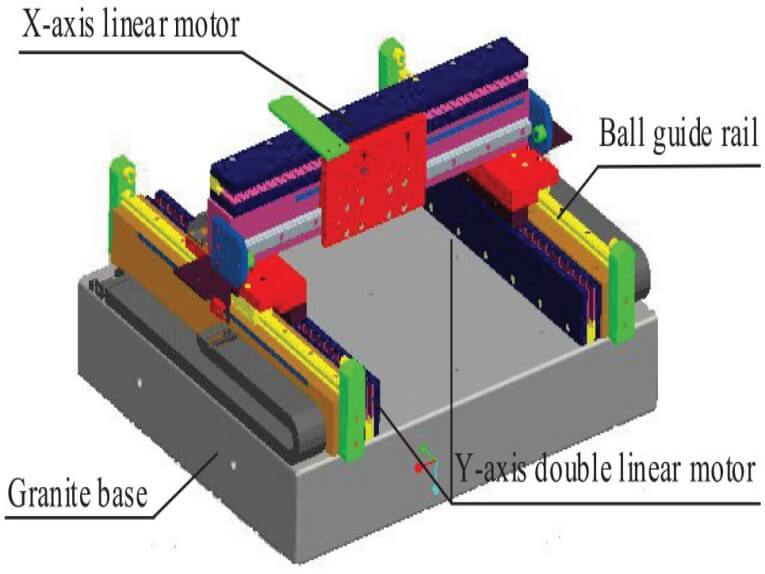
Lineaarimoottorit ovat määritelleet uudelleen liikkeenohjauksen mahdollisuudet nopeammalla, tarkemmalla ja luotettavammalla suorituskyvyllä verrattuna perinteisiin, pyörivillä moottorikäyttöisillä lineaaritoimilaitteilla varustettuihin. Lineaarimoottorin ainutlaatuinen ominaisuus on, että kuormaa liikutetaan ilman mekaanisia voimansiirtokomponentteja. ...Lue lisää -
Lineaarimoottorit ja toimilaitteet täyttävät automaatiotarpeet
Lineaarimoottorit ja -toimilaitteet ovat nyt kustannustehokkaita kuularuuvien ja hihnakäyttöjen kanssa ja tarjoavat huomattavasti paremman ketteryyden ja kaistanleveyden edistyneisiin paikannussovelluksiin. Uudet mikromoottorit ja toimilaitteet auttavat automatisoimaan tehtäviä, jotka eivät aiemmin olleet mahdollisia. Suorat lineaarikäytöt ovat yhä...Lue lisää -
Miksi käyttää lineaarimoottoria kuularuuvin tai lineaaritoimilaitteen sijaan?
Kun joku sanoo ”moottori”, useimmille ihmisille mieleen tulee yleensä jokin pyörivä esine. Moottorit voivat kuitenkin olla eri muotoisia, kuten lineaarimoottoreita. Lineaarimoottorin keksi 1940-luvun lopulla Manchesterin yliopiston tohtori Eric Laithwaite. He aloittivat ...Lue lisää -
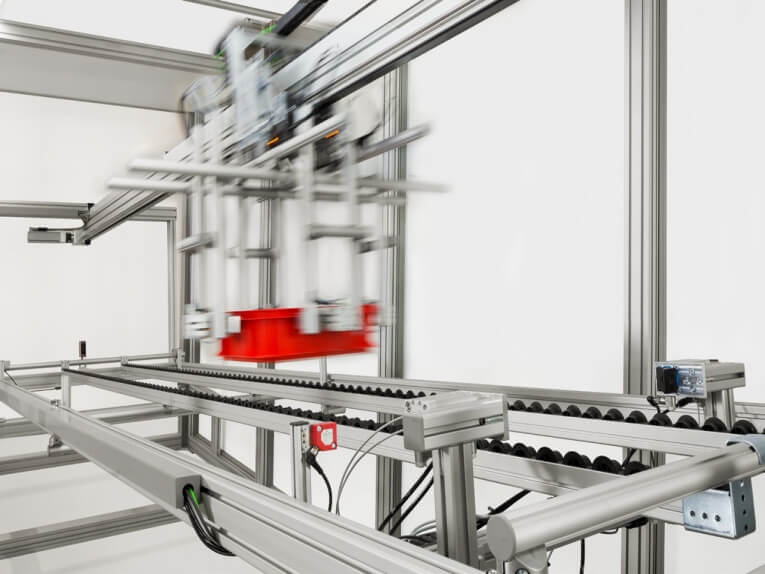
Lopputulos: Tehokkaita robottityyppejä lavaukseen, käärimiseen ja etiketöintiin
Lavaaminen, lavapakkaus ja etiketöinti muodostavat tuotantolinjan viimeiset vaiheet useimmissa pakkaussovelluksissa tuotetyypistä riippumatta. Valmistajien tarpeiden perusteella tässä artikkelissa esitellään oikeat ratkaisut kullekin prosessille – ja korostetaan haasteita...Lue lisää -
MIKÄ ON LINEAARIMOOTTORI – Rautaytiminen ja raudaton moottoriperiaate
Lineaarimoottorit ovat erityisluokka synkronisia harjattomia servomoottoreita. Ne toimivat kuten vääntömomenttimoottorit, mutta ne on avattu ja rullattu litteäksi. Käämikokoonpanon (ensisijainen osa) ja kestomagneettikokoonpanon (toissijainen osa) välisen sähkömagneettisen vuorovaikutuksen kautta sähköenergia ...Lue lisää -
MIKÄ ON LINEAARIMOOTTORI – SUORAVETOJEN EDUT
Miksi lineaarimoottoreita kannattaa käyttää? Alhaisemmat omistuskustannukset Hyötykuorman suora kytkentä moottorin liikkuvaan osaan poistaa mekaanisten voimansiirtoelementtien, kuten johtoruuvien, jakohihnojen, hammastankojen ja hammaspyörien sekä matovaihteiden, tarpeen. Toisin kuin harjallisissa moottoreissa, osien välillä ei ole kosketusta...Lue lisää -
Mikä on lineaarimoottori?
Lineaarimoottoria kuvataan usein pyöriväksi moottoriksi, joka on vain leikattu ja rullattu osiin niin, että pyörivän akselin sijaan vääntömomenttia luo lineaarisesti liikkuva kuorma. Lineaarimoottorit käyttävät magneettista levitaatiota esineen liikuttamiseen – tällä tavoin kitka ei hidasta sitä ja se voi itse asiassa...Lue lisää -
7 parasta teollisuusrobottia, jotka sinun on tiedettävä
Teollisuusrobotit ovat automatisoituja koneita, joita käytetään valmistavassa teollisuudessa ihmisten sijasta. Ne ovat nopeampia, tarkempia ja voivat toimia päiväkausia, mikä on ominaisuus, joka selittää niiden asteittaisen nousun valmistavassa maailmassa. Teollisuusrobotit voidaan luokitella seitsemään pääluokkaan...Lue lisää
