







-
Moniakseliset järjestelmät: FUYU Motionin paikannus- ja liikevaiheet
Moniakseliset järjestelmät ovat konejärjestelmiä, jotka toteuttavat ennalta määritellyn moniulotteisen liikkeen. Kaikki FUYU-tuotteet perustuvat todistettuun tribologiaan ja käyttävät itsevoitelevia lineaariyksiköitä – mikä mahdollistaa liikkuvien osien elinikäisen toiminnan ilman ulkoista voitelua sekä valtavia kustannussäästöjä, koska...Lue lisää -
KARTESIAANISET PORTTIROBOTIT – EDUT JA SOVELLUKSET
SCARA- ja nivelvarsirobotit saattavat olla markkinoiden tunnetuin robottityyppi, mutta portaalirobotit sopivat parhaiten suuriin töihin mahdollisimman pienessä tilassa. Portaalirobotit, joita kutsutaan myös karteesisiksi roboteiksi, ovat lähes kaikkialla automatisoituja, mutta ne eivät vieläkään ole nopeita ...Lue lisää -
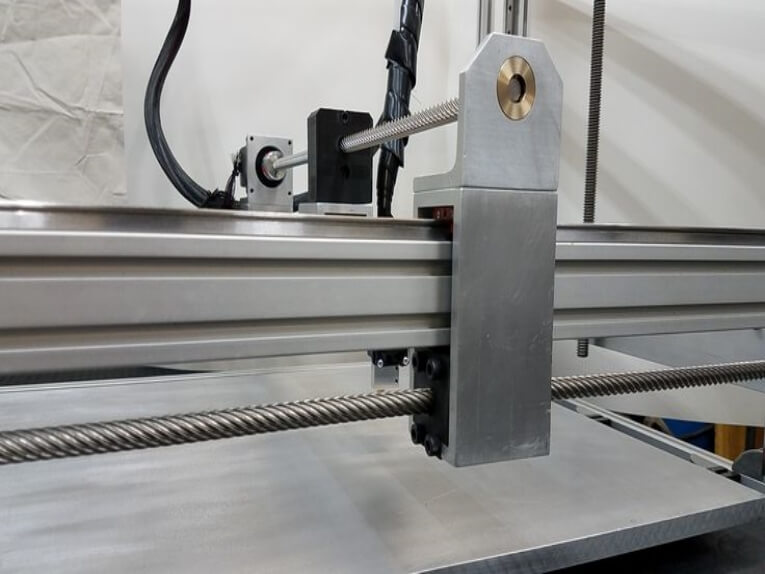
Kuularuuvisovellusten keskeiset tekijät
Miksi kuularuuvit? Viime vuosina minikuularuuveille on tullut entistä selvemmäksi asiakkaiden kanssa käytyjen keskustelujen ja markkinoilta saadun palautteen perusteella. Erityisesti kasvava kysyntä kohdistuu korkealaatuisiin, Yhdysvalloissa valmistettuihin ja varastosta saatavilla oleviin kuularuuveihin. Vastauksena tähän FUY...Lue lisää -
Mitä ovat portaalirobotit? Lineaarisen paikannuspöydän valinta ja integrointi.
Robottiportaalin edut ja haitat Robottiportaalit tarjoavat useita etuja ja haittoja verrattuna muuntyyppisiin robotteihin tai perinteisiin automaatioratkaisuihin. Tässä on joitakin robottiportaalien tärkeimmistä eduista: Korkea tarkkuus: Robottiportaalit voivat saavuttaa korkean tarkkuuden...Lue lisää -
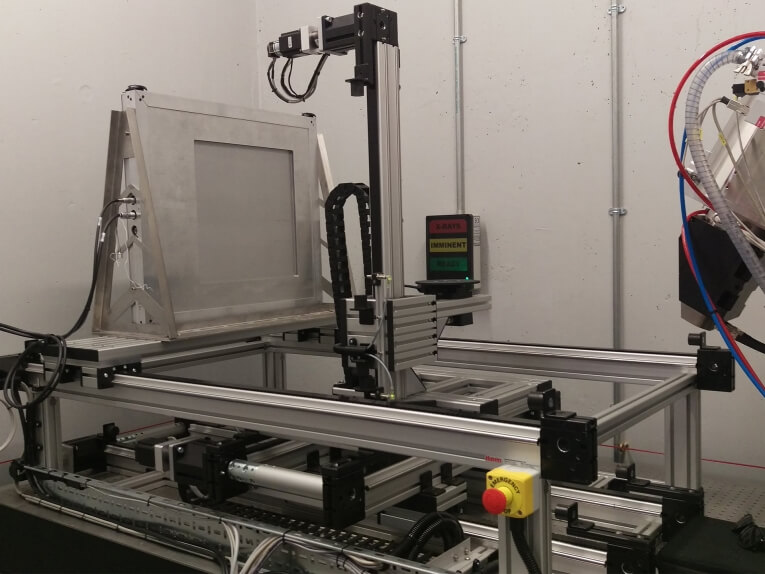
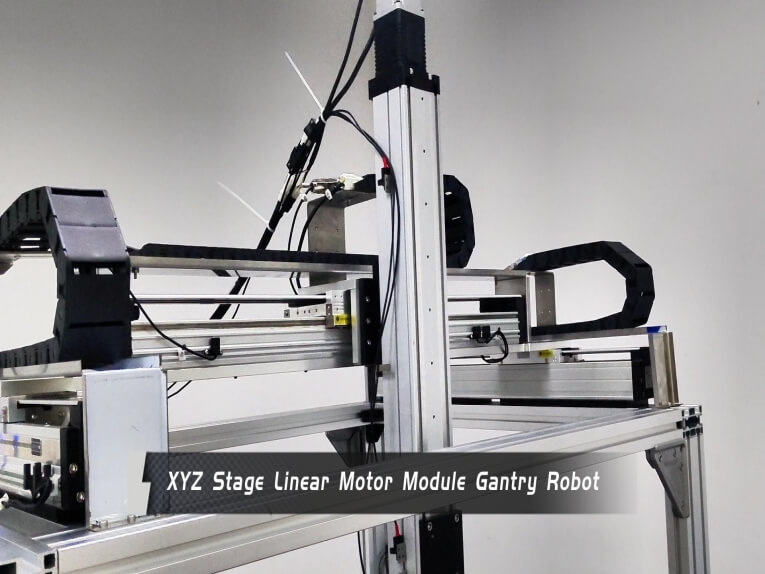
Mitä ovat portaalirobotit? Moniakselisten lineaariliikejärjestelmien tyypit ja sovellukset.
Robottiportaalien tyypit Robottiportaaleja on saatavilla eri muodoissa ja kokoisina, ja jokainen tyyppi on suunniteltu suorittamaan tiettyjä tehtäviä. Tässä ovat robottiportaalien päätyypit: Karteesinen portaali Karteesiset portaalit, jotka tunnetaan myös lineaarisina robottiportaalien nimillä, ovat yleisimmin käytetty robottiportaalityyppi. Ne s...Lue lisää -
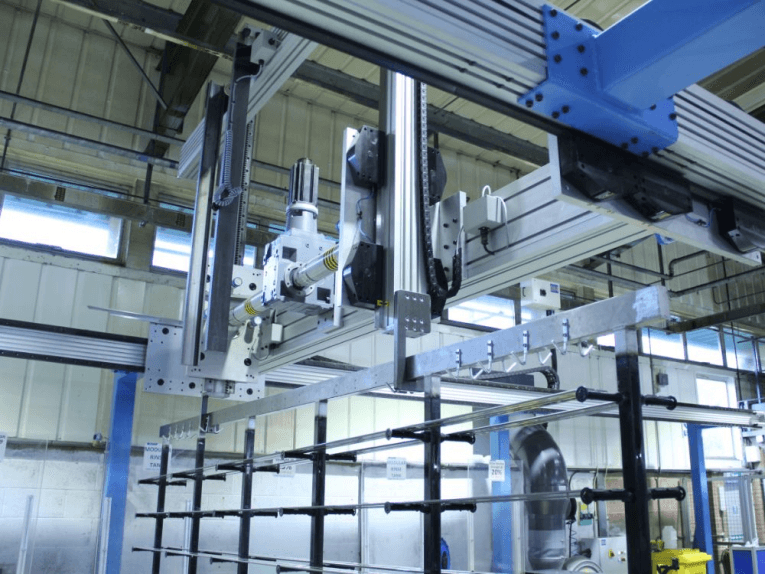
Mitä ovat robotin nostolaitteet? XYZ-paikannusjärjestelmän komponentit.
Robottiportarit ovat tehokkaita työkaluja nykyaikaisessa valmistuksessa ja automaatiossa, ja ne tarjoavat lisää tarkkuutta, joustavuutta ja tehokkuutta monissa sovelluksissa. Johdanto Robottiportarit ovat teollisuusrobotteja, joissa on robottikäsivarsi, joka on asennettu yläpuoliseen kiskojärjestelmään tai runkoon. Portaalin rakenne...Lue lisää -

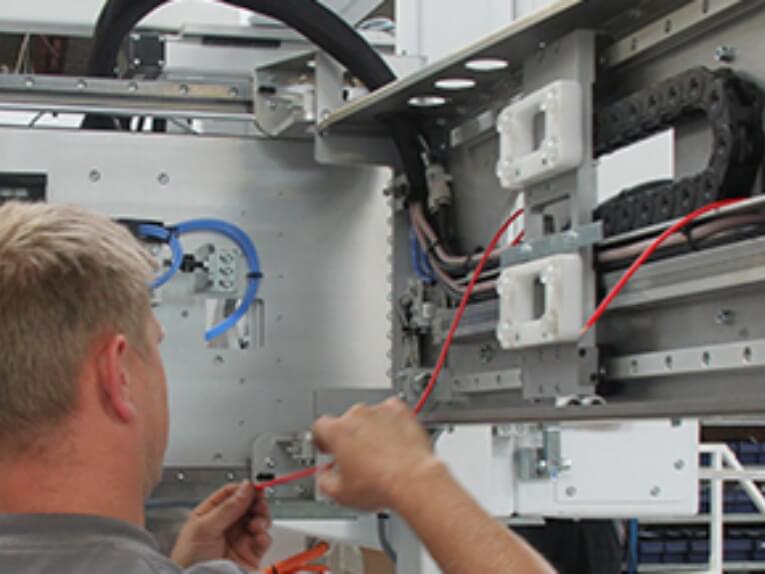
Räätälöityjen teollisuusautomaatioratkaisujen hyötyjen maksimointi
Valmistajien elämä olisi paljon helpompaa, jos kaikki heidän automaatioprosessinsa olisivat homogeenisia. Valitettavasti on monia, jotka vaativat räätälöintiä automatisoidun työkappaleen kiinnitys- tai materiaalinkäsittelysovelluksen ainutlaatuisten vaatimusten täyttämiseksi. Tämä pätee mihin tahansa sovellukseen...Lue lisää -
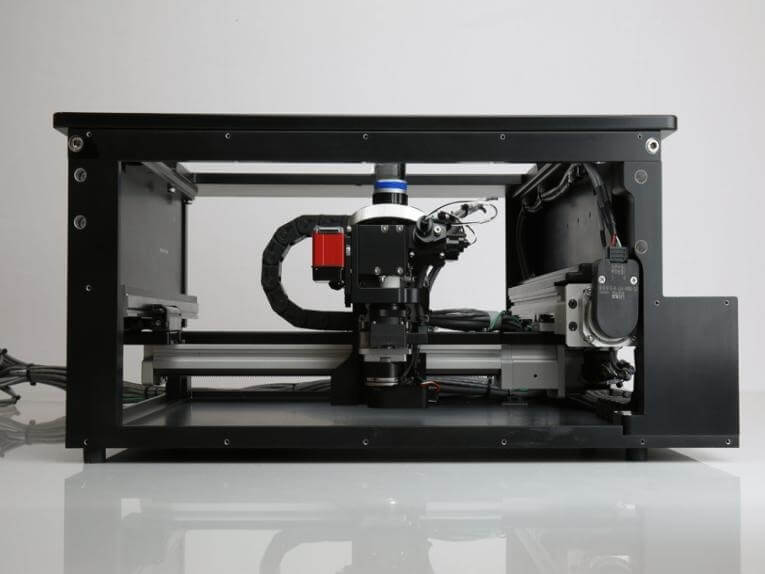
Mikä on lineaarinen vaihe?
Lineaarinen alusta vakauttaa liikeakselin liikutettavalle esineelle, jota liikejärjestelmä liikuttaa. Tuotettu liukuva liike on saanut jotkut kutsumaan laitetta lineaariseksi liukumäeksi, joka on alustan lineaarista liikettä kantava komponentti. Lineaarisen eli siirtymäalustan osiin kuuluu...Lue lisää -

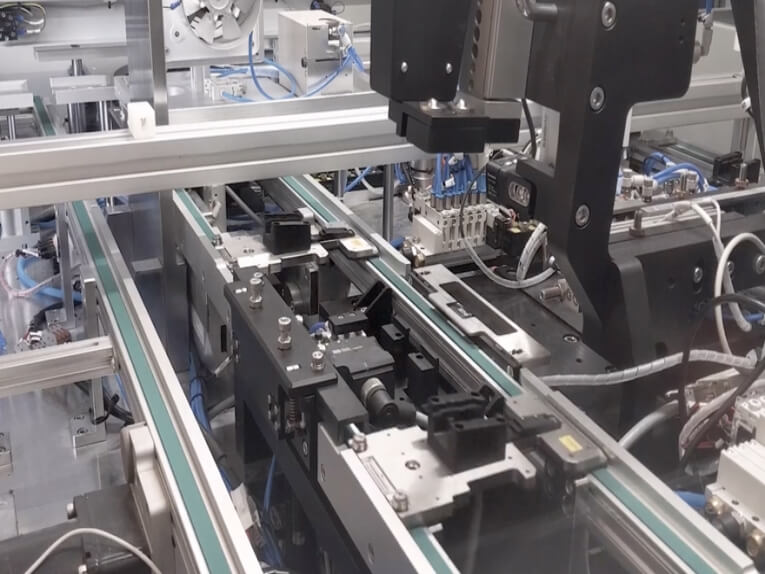
Korkean tarkkuuden lineaarimoottorivaiheet teollisuusautomaatioon
Tarkkuusteollisuuden liikejärjestelmiä käytetään esimerkiksi erittäin tarkkojen ja arvokkaiden komponenttien testauksessa, kokoonpanossa tai lasermikrokoneistuksessa sekä elektroniikassa, optiikassa ja fotoniikan valmistuksessa. Ottaen huomioon, että jokaisessa Yhdysvalloissa myytävässä modernissa autossa on ainakin yksi kamera...Lue lisää -
Johdatus Plug-and-Play-lineaariliikejärjestelmiin
Jos rakennat koneita, työskentelet todennäköisesti toimilaitteiden ja paikannusvaiheiden kanssa joka päivä. Mutta saatko todella näistä liikelaitteista parhaan suorituskyvyn tai alhaisimmat omistuskustannukset? Vastaus ei välttämättä ole se, mitä odotat. Liian usein insinöörit ajattelevat vaiheita tai toimilaitteita vain yhtenä ...Lue lisää -

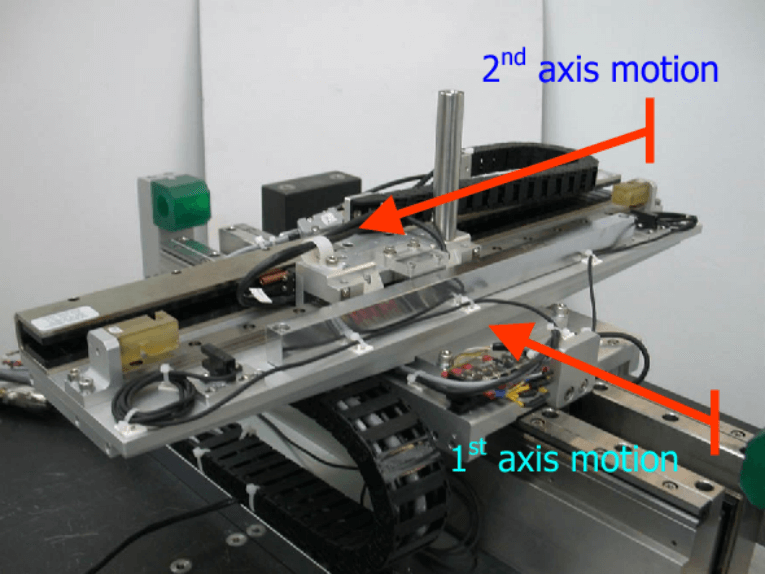
Mikä on XYZ-lineaarirobotti?
Karteesista koordinaatistoa käyttävää robottia kutsutaan myös suoraviivaiseksi robotiksi tai pallomaiseksi XYZ-robotiksi, koska se on varustettu kolmella liukunivelellä XYZ-akseleiden kokoamiseksi. Karteesista konfiguraatiota käyttävän robotin varren liikettä voidaan kuvata kolmella leikkaavalla...Lue lisää -
Liikkeenohjauksen mullistaminen lineaarimoottoreilla
Lineaarimoottorit ovat määritelleet uudelleen liikkeenohjauksen mahdollisuudet nopeammalla, tarkemmalla ja luotettavammalla suorituskyvyllä verrattuna perinteisiin, pyörivillä moottorikäyttöisillä lineaaritoimilaitteilla varustettuihin. Lineaarimoottorin ainutlaatuinen ominaisuus on, että kuormaa liikutetaan ilman mekaanisia voimansiirtokomponentteja. Inst...Lue lisää
