







-
Kuinka toteuttaa räätälöidyn lineaaripaikannusjärjestelmän käyttöönotto?
Edellisessä artikkelissa keskityimme ohjelmasuunnitteluvaiheen tärkeyteen ja Fuyun omiin prosessispesifikaatioihin epästandardille suunnittelulle. Joten miten toteutamme toteutuksen suunnitelman määrittämisen jälkeen? Kuvitellaan ensin tilanne, jossa Fuyun tuotantopajassa sisäinen...Lue lisää -

Lineaariliikejärjestelmien mitoitus ja valinta
Kuinka ”LOSTPED” voi auttaa? Pakkaamisesta ja materiaalinkäsittelystä puolijohteiden valmistukseen ja autoteollisuuden kokoonpanoon, käytännössä kaikki valmistusprosessit sisältävät jonkinlaista lineaarista liikettä, ja valmistajien tutustuessa modulaaristen lineaariliikkeiden joustavuuteen ja yksinkertaisuuteen ...Lue lisää -

Vaarattoman lineaarisen liikkeen saavuttaminen
Sähkömekaanisten toimilaitteiden turvallisuusperustelu hydraulisylintereihin verrattuna. Lineaariliikekoneiden suunnittelijat valitsevat yhä useammin sähkömekaanisia toimilaitteita, koska ne ovat puhtaampia, helpompia hallita ja vaativat vähemmän huoltoa kuin hydraulisylinterit. Usein unohdetaan kuitenkin...Lue lisää -
Kaksi käyttöä takaavat tarkan kaksoisnopeuksisen liikkeen
Erittäin tarkat lineaariset paikannusjärjestelmät, kuten mittaus- ja tarkastuslaitteiden tarkennukseen ja skannaukseen käytettävät järjestelmät, tarvitsevat usein kaksi erilaista liiketilaa: nopean tilan (100 mm/s) ja hitaamman tilan (20 nm/s). Nopea tila lyhentää liikeaikaa, kun taas hitaampi tila varmistaa tarkkuuden. Käyttäjä...Lue lisää -

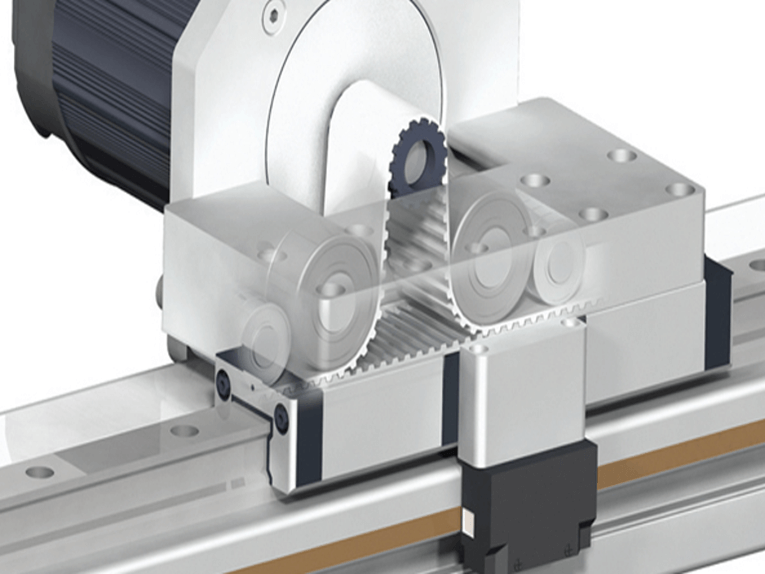
Lineaarisen paikannusjärjestelmän hammashihnat
Hihnan ja hihnapyörän jako, hihnan pituus ja keskipisteiden välinen etäisyys. Vahvistetut uretaanista valmistetut hammashihnat toimivat hyvin tarkoissa lineaariliikkeissä ja kuljetussovelluksissa, koska ne venyvät hyvin vähän, eivät viru tai luista ja ovat paljon jäykempiä kuin neopreeni, mikä tarkoittaa pienempää hampaan taipumista. Lineaariliikkeessä...Lue lisää -
Paikannusohjauksen kehitys
Tutkijat etsivät jatkuvasti tapoja parantaa lineaaristen paikannusjärjestelmien tarkkuutta, vähentää tai poistaa välystä sekä helpottaa tällaisten laitteiden käyttöä. Tässä katsaus viimeaikaiseen kehitykseen. Olipa tarvittava lineaarinen liike pieni tai suuri, paikannustarkkuus ja luotettavuus...Lue lisää -
Mikä on räätälöity lineaariliikejärjestelmä, joka parhaiten vastaa käyttäjien tarpeisiin?
Epästandardi lineaarinen paikannusmoduuli. Fuyun aiemmin tuotetut piirustukset ja standardoidut moduulit niihin liittyvine materiaaleineen voidaan katsoa modulaarisiksi tuotteiksi. Toisaalta uusia malleja, joissa on suhteellisen suuria suunnittelumuutoksia olemassa olevien moduulien pohjalta, voidaan pitää "epästandardina...".Lue lisää -
Vinkkejä erittäin tarkkojen lineaaristen paikannusjärjestelmien valintaan: Osa 3
Vaiheiden, käyttölaitteiden ja kooderien suunnittelu. Tarkan paikannusjärjestelmän komponenttien – laakereiden, paikanmittausjärjestelmän, moottori- ja käyttöjärjestelmän sekä ohjaimen – on toimittava yhdessä mahdollisimman hyvin. Osa 1 käsitteli järjestelmän pohjaa ja laakereita. Osa 2 käsitteli paikanmittaus...Lue lisää -
Vinkkejä erittäin tarkkojen lineaaristen paikannusjärjestelmien valintaan: Osa 2
Mikään yksittäinen järjestelmä ei sovi kaikille. Tarkan paikannusjärjestelmän komponenttien – alustan ja laakerit, paikanmittausjärjestelmän, moottori- ja käyttöjärjestelmän sekä ohjaimen – on toimittava yhdessä mahdollisimman hyvin. Osassa 1 käsittelimme järjestelmän alustaa ja laakereita. Tässä käsittelemme paikannusta...Lue lisää -
Vinkkejä erittäin tarkkojen lineaaristen paikannusjärjestelmien valintaan: Osa 1
Elektroniikka-, optiikka-, tietokone-, tarkastus-, automaatio- ja laserteollisuus vaativat erilaisia paikannusjärjestelmien spesifikaatioita. Mikään yksittäinen järjestelmä ei sovi kaikille. Jotta erittäin tarkka paikannusjärjestelmä toimisi optimaalisesti, järjestelmän komponentit – laakerit, paikanmittausjärjestelmät...Lue lisää -
Milloin ulkoistaa: Plug-and-play-liikejärjestelmät
Liiketoimilaitteiden ja -vaiheiden rakentaminen tyhjästä pakottaa suunnittelijat tilaamaan, varastoimaan ja kokoamaan satoja osia. Se myös pidentää markkinoille saattamista ja vaatii teknikkoja ja erikoistuneita tuotantolaitteita. Vaihtoehto on tilata valmiiksi suunniteltuja liikelaitteita. Vaihtoehtoja ja -vaiheita on...Lue lisää -

Lineaarisen liikkeen hienompi hallinta
Tarkkaan automatisoituun paikannukseen kannattaa harkita askelmoottoripohjaisia lineaaritoimilaitteita. Lineaaritoimilaitteet tuottavat pohjimmiltaan voimaa ja liikettä suoraviivaisesti. Tyypillisessä mekaanisessa järjestelmässä laitteen lähtöakseli tarjoaisi lineaarisen liikkeen pyörivän moottorin avulla hammaspyörien, hihnan ja hihnapyörän avulla...Lue lisää
