







-
रोबोटिक्स या मोशन कंट्रोल? यही सवाल है।
निर्णय लेने में मदद करने वाले 10 प्रश्न। हालाँकि रोबोटिक्स और मोशन कंट्रोल में अंतर करना अक्सर मुश्किल हो जाता है, लेकिन ये दोनों एक ही चीज़ नहीं हैं। कई मायनों में ये आपस में closely related हैं, लेकिन रोबोटिक्स ज़्यादातर “pre-engineered” समाधानों की ओर झुकाव रखते हैं, जबकि मोशन कंट्रोल ज़्यादा मॉड्यूलर समाधानों की ओर झुकाव रखते हैं। यह छोटा लेकिन...और पढ़ें -
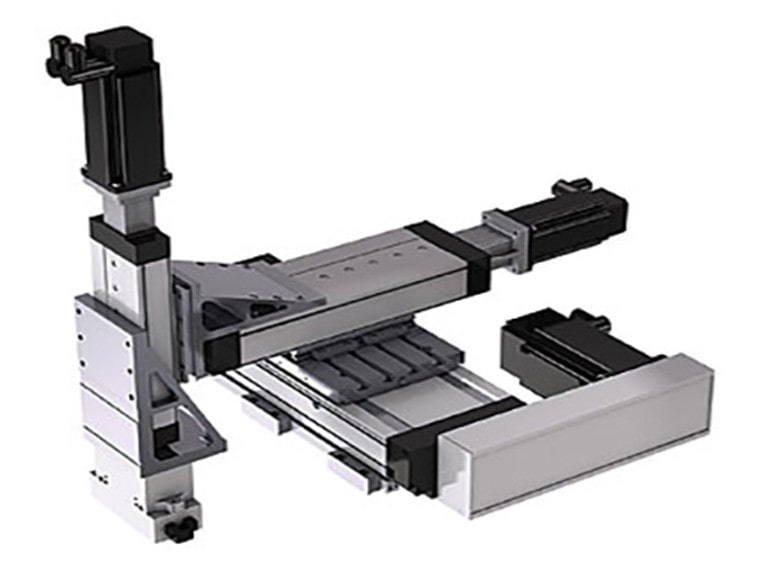
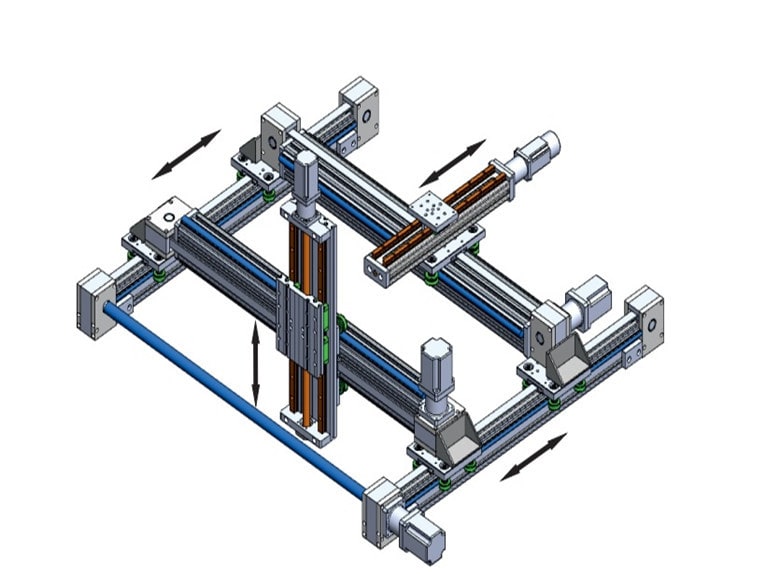
पूर्व-निर्मित कार्टेशियन रोबोटों के चयन के लिए सुझाव
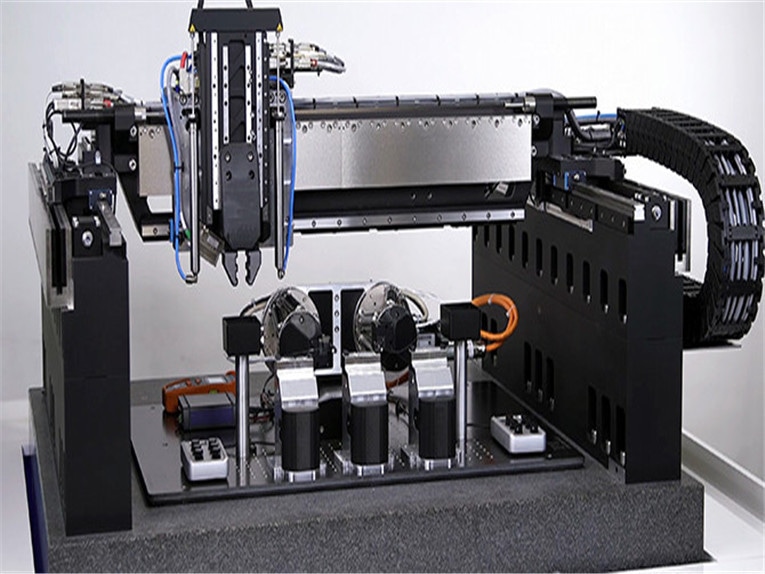
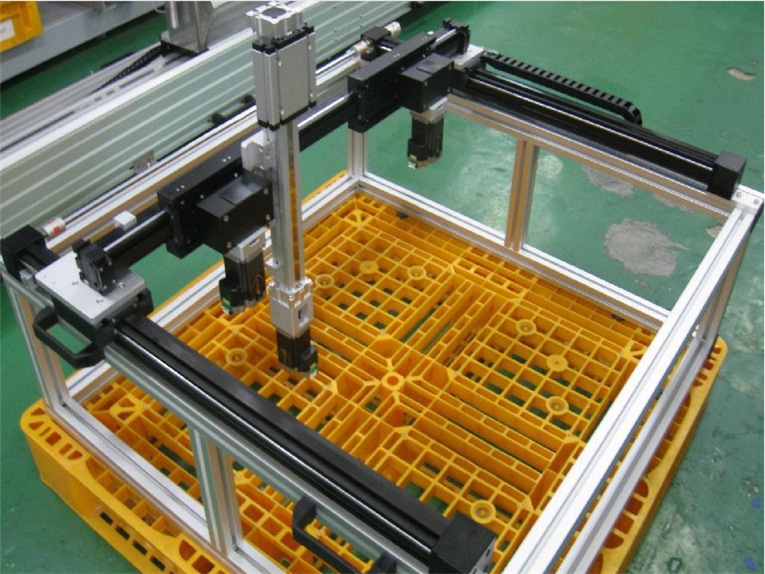
लीनियर पोजिशनिंग सिस्टम डिजाइन करने के 3 चरण: कार्टेशियन रोबोट X, Y और Z के कार्टेशियन कोऑर्डिनेट सिस्टम के अनुदिश दो या तीन अक्षों में काम करते हैं। हालांकि SCARA और 6-अक्षीय रोबोट अधिक व्यापक रूप से मान्यता प्राप्त हैं, कार्टेशियन सिस्टम लगभग हर औद्योगिक अनुप्रयोग में पाए जा सकते हैं, चाहे वह समुद्र से संबंधित हो या...और पढ़ें -
समतलीय त्रुटियाँ क्या हैं और वे रैखिक गति प्रणाली की सटीकता को कैसे प्रभावित करती हैं?
रेखीय, कोणीय और समतलीय त्रुटियाँ। एक आदर्श स्थिति में, एक रेखीय गति प्रणाली पूरी तरह से समतल, सीधी गति प्रदर्शित करेगी और हर बार शून्य त्रुटि के साथ इच्छित स्थिति तक पहुँचेगी। लेकिन उच्चतम परिशुद्धता वाले रेखीय गाइड और ड्राइव (पेंच, रैक और पिनियन, बेल्ट, रेखीय मोटर) में भी कुछ त्रुटियाँ होती हैं...और पढ़ें -
औद्योगिक स्वचालन के लिए स्विस आर्मी नाइफ
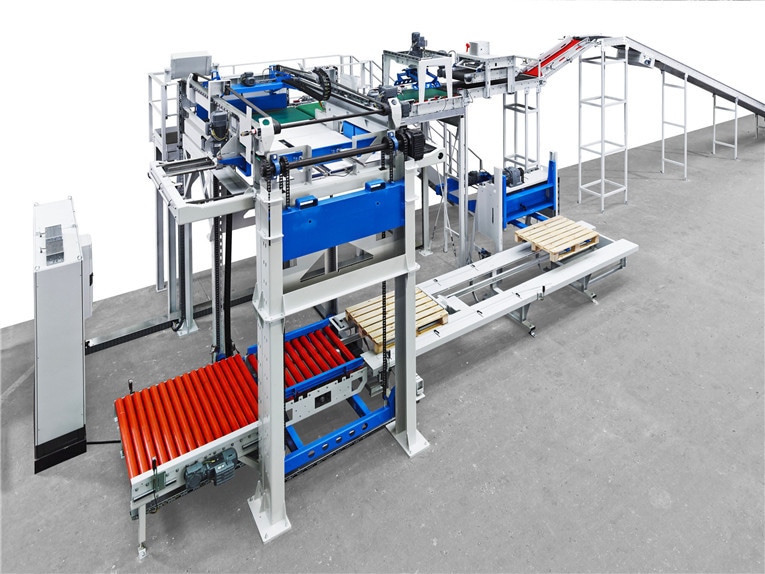
लीनियर रेल गाइड के सामान्य अनुप्रयोग: लीनियर रेल कई औद्योगिक अनुप्रयोगों की रीढ़ हैं, जो कुछ ग्राम से लेकर हजारों किलोग्राम तक के भार के लिए कम घर्षण मार्गदर्शन और उच्च कठोरता प्रदान करती हैं। इनके आकार, सटीकता वर्ग और प्रीलोड की विविधता इन्हें और भी उपयोगी बनाती है।और पढ़ें -
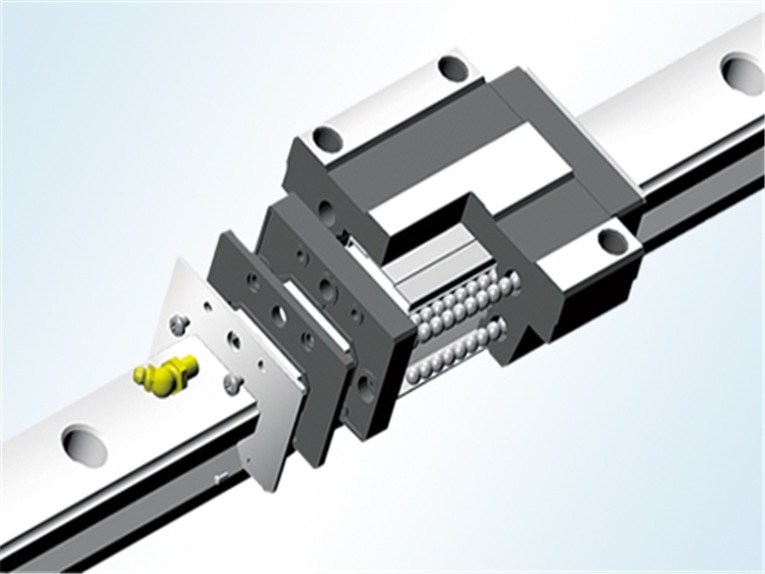
बॉल चेन के साथ लीनियर गाइड और बॉल स्क्रू का उपयोग क्यों करें?
आपके रैखिक गति प्रणाली के लिए प्रमुख डिज़ाइन विशेषता: रेडियल बॉल बियरिंग और रीसर्क्युलेटिंग बॉल लीनियर गाइड के बीच ऐतिहासिक रूप से एक अंतर यह रहा है कि रेडियल बियरिंग आमतौर पर गेंदों को अलग करने और उनकी गति को नियंत्रित करने के लिए एक पिंजरे का उपयोग करते हैं, जबकि प्रोफाइल रेल गाइड ऐसा नहीं करते थे। लेकिन...और पढ़ें -
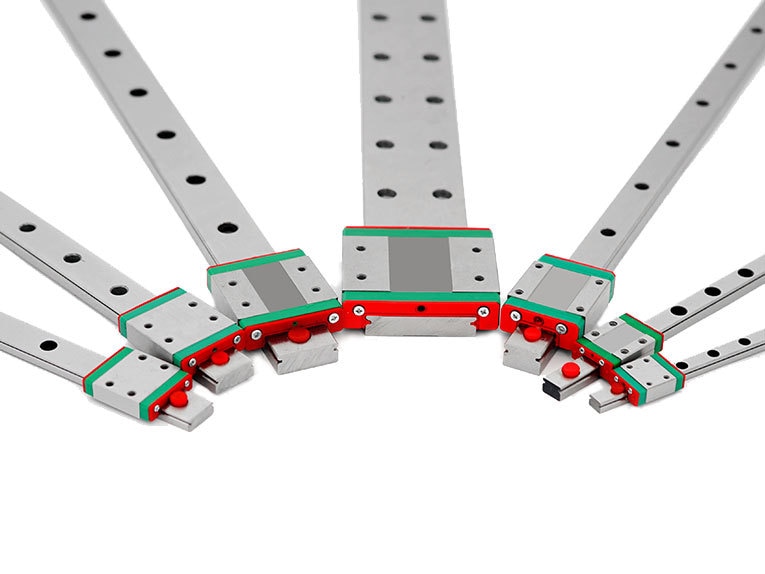
प्लेन और रोलिंग लीनियर गाइड्स में क्या अंतर हैं?
अपने लीनियर पोजिशनिंग सिस्टम के लिए एक अच्छा विकल्प चुनें। लीनियर गाइड (या लीनियर बेयरिंग) एक यांत्रिक तत्व है जो दो सतहों के बीच सापेक्ष गति की अनुमति देता है, जिसमें एक सतह दूसरी को सहारा देती है और दोनों के बीच न्यूनतम घर्षण होता है। लीनियर गाइड दो मूल प्रकार के होते हैं: प्लेन और रो...और पढ़ें -
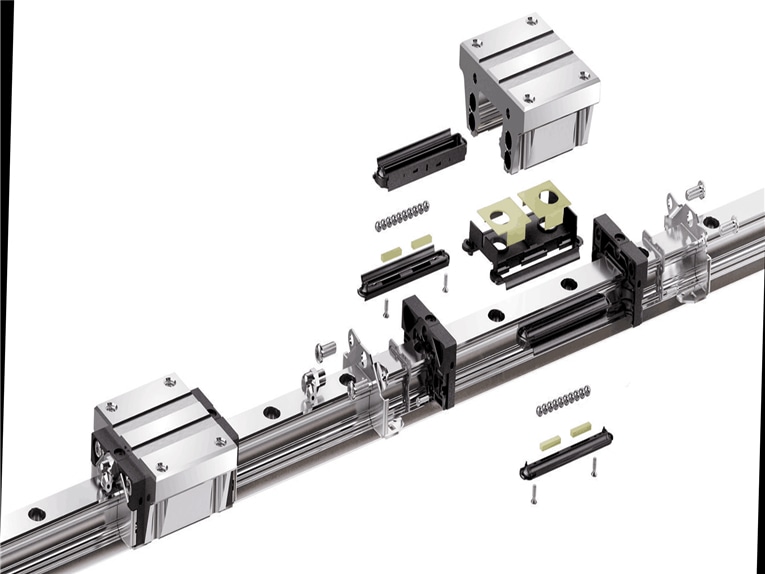
रेखीय प्रणालियों के रखरखाव लागत को कम करने के तीन कारगर तरीके
लीनियर गाइड कैरिज को बदलना या पूरे कैरिज और रेल असेंबली को बदलना। अपर्याप्त लुब्रिकेशन से बेयरिंग खराब हो सकती है। हालांकि लीनियर बेयरिंग के जीवनकाल में लुब्रिकेशन सबसे महत्वपूर्ण रखरखाव कारक है, फिर भी उपयोगकर्ता रखरखाव लागत को कम करने और बेहतर संचालन सुनिश्चित करने के लिए अन्य उपाय भी कर सकते हैं...और पढ़ें -
4 प्राथमिक अनुप्रयोग पैरामीटर—स्ट्रोक, लोड, गति और परिशुद्धता
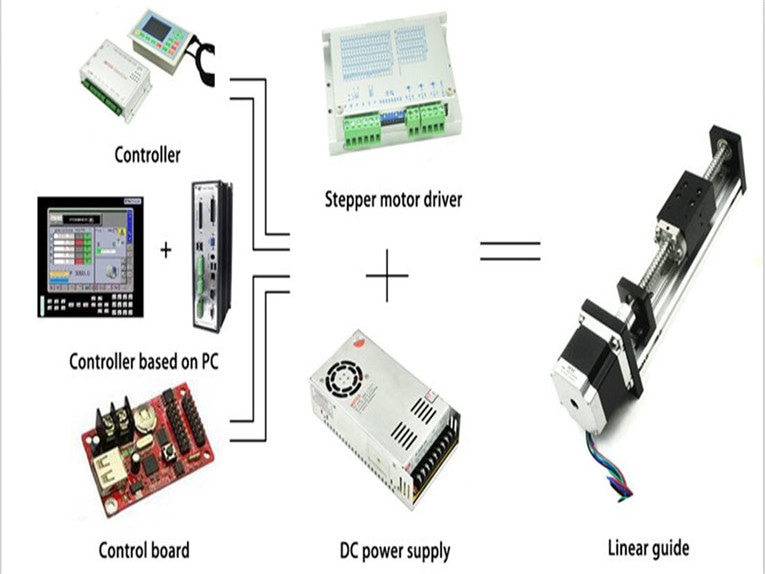
वो दिन बीत गए जब मशीन डिज़ाइनरों और निर्माताओं को या तो अपना लीनियर सिस्टम शुरू से बनाना पड़ता था या पहले से तैयार सीमित सिस्टमों से ही काम चलाना पड़ता था, जो अधिकतर मामलों में उनके उपयोग के लिए पूरी तरह से उपयुक्त नहीं होते थे। आज निर्माता एक र... पर आधारित सिस्टम पेश करते हैं।और पढ़ें -
रेखीय गति प्रणाली को कैसे डिजाइन किया जाए?
उच्च दक्षता, सटीकता और कठोरता। दो बिंदुओं के बीच का सबसे छोटा रास्ता एक सीधी रेखा होता है। लेकिन यदि आप एक रेखीय गति प्रणाली डिज़ाइन कर रहे हैं, तो आपको बिंदु A और B के बीच संरचनात्मक समर्थन, गाइड, ड्राइव, सील, स्नेहन और सहायक उपकरणों पर विचार करना होगा। चाहे आप डिज़ाइन करने का निर्णय लें...और पढ़ें -

इष्टतम और लागत प्रभावी रैखिक गति प्रणाली को डिजाइन करने के लिए सात प्रमुख पैरामीटर
भार, दिशा, गति, यात्रा, परिशुद्धता, वातावरण और कार्य चक्र। दिशा, आघूर्ण और त्वरण सहित अनुप्रयोग का सावधानीपूर्वक विश्लेषण करने से वह भार ज्ञात होगा जिसे वहन करना आवश्यक है। कभी-कभी, वास्तविक भार परिकलित भार से भिन्न हो सकता है, इसलिए इंजीनियरों को इन कारकों पर विचार करना चाहिए...और पढ़ें -
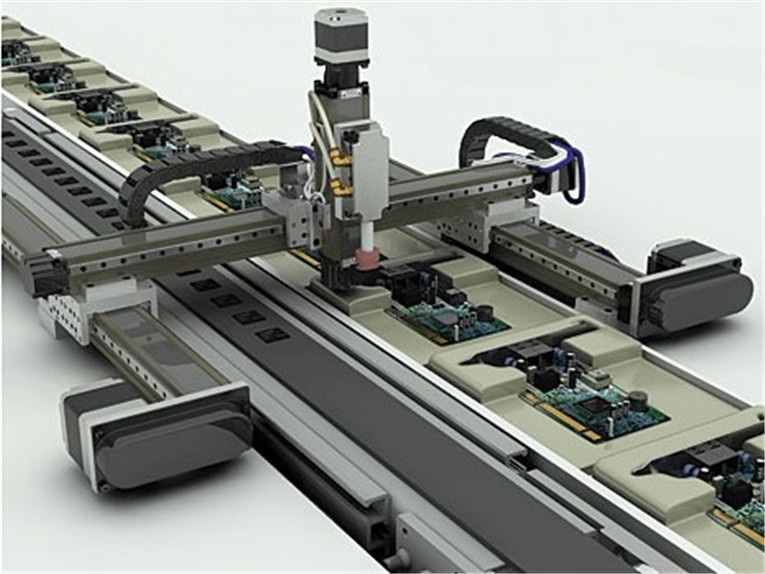
अत्याधुनिक सर्वो ड्राइव कंपन को कम करता है
कंपन को कम करने से सेटलिंग टाइम में काफी कमी आती है। हाई-स्पीड पिक-एंड-प्लेस ऑपरेशन में, सेटलिंग टाइम उत्पादकता का दुश्मन होता है। अधिक मात्रा में असेंबली के लिए गति आवश्यक है। हालांकि, गति समस्याएं भी पैदा करती है। उदाहरण के लिए, पिक-एंड-प्लेस ऑपरेशन में, एक तरफ से दूसरी तरफ तेजी से आगे बढ़ना...और पढ़ें -

लीनियर सिस्टम का चयन करते समय इन कारकों को नज़रअंदाज़ न करें।
गति का जीवनकाल बहुत मायने रखता है। किसी रैखिक प्रणाली का आकार निर्धारित करते समय, सबसे पहले ध्यान में आने वाले अनुप्रयोग पैरामीटर संभवतः यात्रा, भार और गति होते हैं। इसके अलावा, भार की स्थिति, गति प्रोफ़ाइल और कार्य चक्र के बारे में विवरण की आवश्यकता होती है ताकि बियरिंग के उपयोगी जीवनकाल की सटीक गणना की जा सके...और पढ़ें
