








הידראוליקה מציעה חיי שירות ארוכים, אך היא אינה יעילה כמו מערכות חשמליות. מערכות חשמליות מספקות גם בקרת מיקום, מהירות ומהירות מדויקת עם פעולה יעילה יותר. הן פועלות בסביבה סגורה לאיסוף נתונים קל, והן כמעט ואינן דורשות תחזוקה.
למעשה, ככל שמפעילים חשמליים בסגנון מוט יהיו מסוגלים לספק כוחות דומים לאלו של הידראוליקה מתקדמת, הם יהפכו לתחליפים ברי-קיימא יותר ויותר למערכות הידראוליות ביישומים רבים. הערכת יכולות ומגבלות והתאמתן למטרות וליעדי המערכת יסייעו לקבוע את הבחירה הטובה ביותר עבור היישום.
במשך עשרות שנים, צילינדרים הידראוליים היו הטכנולוגיה היחידה בת הקיימא עבור יישומים בעלי כוח גבוה. מערכות הידראוליות הן עמידות ופשוטות יחסית לפריסה - בנוסף מספקות עלות נמוכה יותר ליחידת כוח. אין פלא שצילינדרים הידראוליים הפכו...לְמַעֲשֶׂהבחירה להנעת כמעט כל חפץ כבד שיש להזיז בקו ישר, בין אם מהר או לאט, למעלה או למטה... כולל מכבשי מתכת, מסועים, מנופים, מסורים ועוד רבים אחרים.
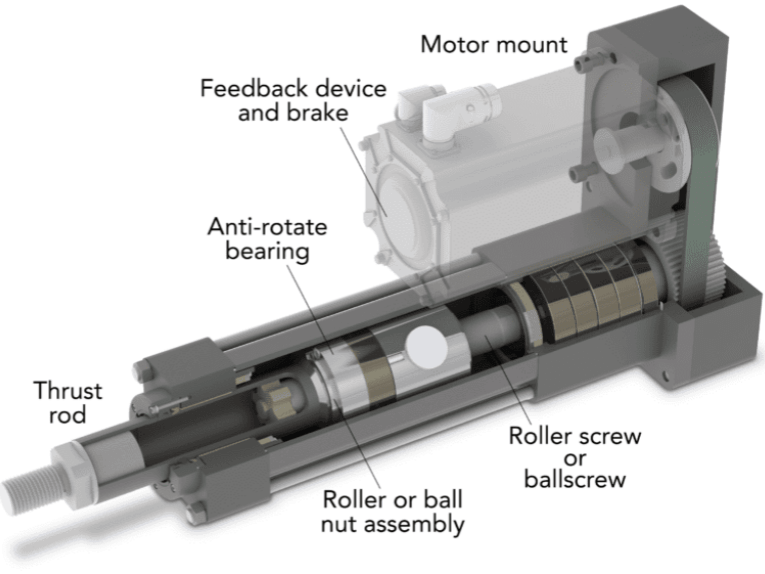
מפעילי מוט חשמליים (הנקראים לעיתים צילינדרים חשמליים) הם טכנולוגיית התנועה החדשה ביותר המציעה אלטרנטיבה להידראוליקה. מפעילים חשמליים גמישים, מדויקים ואמינים יותר באופן יחסי, עם יכולות כוח הולכות וגדלות.
הבנת היתרונות של מערכות חשמליות על פני מערכות הידראוליות תעזור לקבוע את הבחירה הטובה ביותר עבור יישום מסוים. בנוסף, הבנת מספר טיפים חשובים להמרה מבטיחה מעבר מוצלח מיישומים הידראוליים להנעה חשמלית.
הידראוליקה: טכנולוגיה מדור קודם עם כמה חסרונות
מפעילים יודעים כיצד לשמור על מכונות הידראוליות פועלות. ובכל זאת, ישנם אתגרים וחסרונות. בהידראוליקה, זו לא שאלה של אם, אלא מתי מערכות הידראוליות ידלפו או יישברו. ניקוי הוא מלכלך וגוזל זמן. ייתכן שיהיה צורך לגרוט חלקי ייצור או מוצרים. הידראוליקה דורשת גם טביעת רגל גדולה יחסית עבור המדחס, כמו גם תחזוקה שוטפת והחלפה ידנית. בנוסף, הידראוליקה רועשת, יכולה להיות רגישה לתנודות טמפרטורה, אין לה יכולות מדויקות של ריבוי מצבים, ופועלת בלולאה פתוחה - מה שמסבך את איסוף הנתונים לשימוש על ידי בקרות המכונות.
מפעילים חשמליים לשיפור בקרת תנועה
הסיבה העיקרית שבגללה מהנדסים בוחרים במערכת מפעיל חשמלית על פני מערכת צילינדרים הידראולית היא הגמישות של יכולות בקרת התנועה שלה:
1. בקרת מיקום - למספר מיקומים בדיוק רב
2. בקרת מהירות
3. בקרת תאוצה והאטה
4. שליטה מדויקת בכוח הפלט
5. שליטה מתוחכמת תוך כדי תנועה בכל משתני התנועה הללו.
מפעילים חשמליים, בשילוב עם מערכת הנעת סרוו ומנוע, מאפשרים שליטה אינסופית על המיקום... והדיוק וחזרתיות עולים בהרבה על אלה של מערכות הידראוליות.
הידראוליקה סטנדרטית מצטיינת ביישומי מיקום מקצה לקצה, אך מיקום באמצע מהלך עם צילינדרים אלה הוא מסובך יותר - ודורש שסתום בקרה וסיוע מהמפעיל. מיקום באמצע מהלך הוא בלולאה פתוחה ודורש מהמפעיל להחליט איזה מיקום מקובל. יתר על כן, בקרת המהירות מנוטרת באמצעות שסתום בקרה ושוב דורשת מהמפעיל לכוון את המהירות המקובלת עבור יישום... אם כי להגיע להגדרת מהירות מדויקת לעיתים קרובות קשה.
לאחר כוונון הגדרת המהירות, תפוקת כוח הלחץ הנדרשת מהצילינדר ההידראולי מווסתת דרך שסתום הלחץ. שוב, בדרך כלל נדרש מהמפעיל לכוון את כוח היעד. יתרה מכך, החזרתיות של הצילינדר ההידראולי לגבי מיקום, מהירות וכוח נפגעת עקב אטמים שחוקים, דליפות, ירידות לחץ וקפיצות לחץ הנגרמות על ידי המשאבה, יחד עם גורמים אחרים הקשורים לתחזוקה. קשה להשיג ביצועים חוזרים יומיומיים או חודשיים (ועוד פחות משנה לשנה) עבור סביבות ייצור בהן איכות השמן וצמיגותו משתנות בהתאם לטמפרטורה. לכן, השגת רמת הביצועים היעד מחייבת התערבות מתמדת של המפעיל.
בקרת מהירות ברמת סרוו מדויקת
ישנם יתרונות נוספים למפעילים חשמליים כאשר הם משולבים עם מערכות בקרת סרוו. בקרי סרוו המסוגלים לשלוט במספר צירים זמינים בקלות כרכיבים מוכנים לשימוש. ניתן לתאם בקרים ומפעילים חשמליים בקלות (ובחסכון) בתצורות מרובות צירים מורכבות. המהירות של מפעיל חשמלי אחד או יותר נשלטת בצורה מדויקת ורציפה - וניתן לשלב אותם בקלות ממהירות אחת לאחרת מבלי לעצור או לחרוג ממיקומי היעד.
בנוסף, בקרת סרוו של תאוצה והאטה מונעת ממפעילים חשמליים להיתקע בעצירות חזקות או להיכנס לפעולה בטלטולים. זה בתורו מבטל את הלחץ על רכיבי שלדת המכונה ואת הצורך בהנדסה יתרה של מבנים כדי לעמוד בעומסי הלם. כל התנועות יהיו חלקות כדי לאפשר למפעילים חשמליים להעניק תנועה חלקה לתהליכים קריטיים שבהם רעידות המכונה אינן מקובלות או עלולות להגביל את מהירות התהליך.
במערכות סרוו, כוח המוצא של המפעיל נשלט באמצעות זרם לתוך מנוע הסרוו. מכיוון שבקרי סרוו יש שליטה מדויקת על הזרם, כמעט כל המפעילים החשמליים מספקים בקרה מדויקת וחוזרת על תפוקת הכוח בנקודת העבודה.
מאפיין חשוב נוסף של מפעילים חשמליים הוא יכולתם לספק בקרה ניתנת לתכנות על כל משתני פרופיל התנועה. כתוצאה מכך, האינטראקציה היחידה הנדרשת עם המפעיל היא זמן התכנון של חזית ה-u כדי לבנות משתני ביצועים יעדים לתוך בקר PLC או סביבת תכנות של בקר אחר. לאחר הגדרתה, הפעולה חוזרת על עצמה מיום ליום, חודש לחודש ומשנה לשנה. מסכי ממשק אדם-מכונה או HMI על חלקי ציוד יכולים להציג (ולאפשר כוונון) של מיקום, מהירות, כוח, תאוצה והאטה בכל עת לגמישות מקסימלית של המכונה.
זמן פרסום: 27 במאי 2026