







-
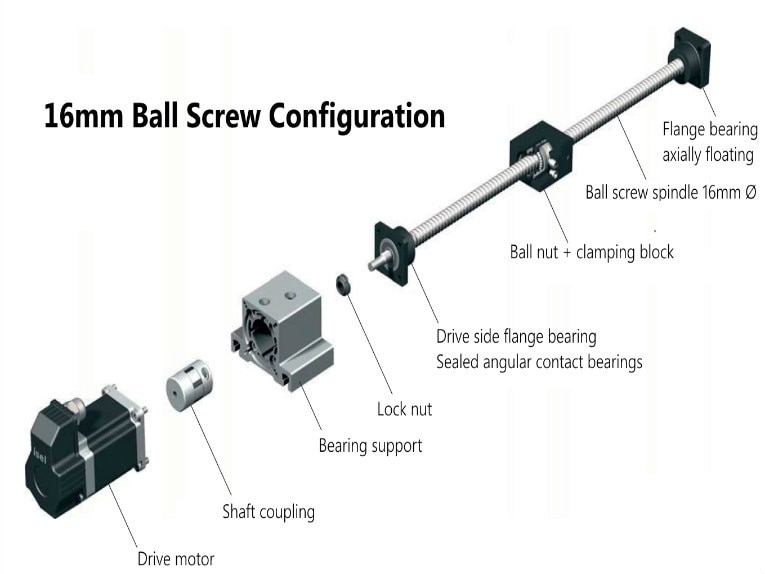
מנוע ליניארי לעומת בורג כדורי
היישום היעיל ביותר מבחינת עלות לעיצוב שלכם. בעוד שמנועים ליניאריים ללא ברזל משמשים ביישומים של מוליכים למחצה ואלקטרוניקה כבר יותר מעשור, הם עדיין נתפסים על ידי מעצבים ויצרני ציוד מקורי רבים כמוצרים "נישתיים". אבל התפיסה של מנועים ליניאריים כפתרון יקר עבור...קרא עוד -
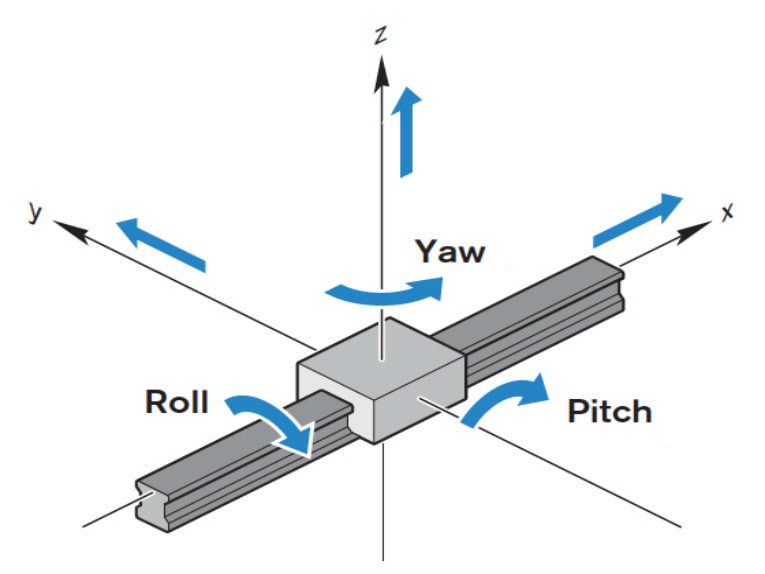
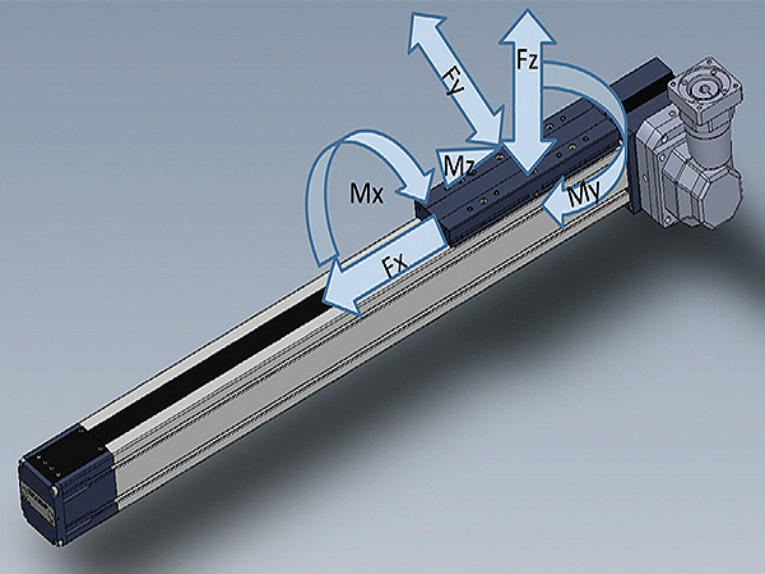
יסודות התנועה: כיצד להגדיר גלגול, גובה (pitch) וסיבוב (yaw) עבור מערכות ליניאריות
כולל רובוטים קרטזיים, מערכות גנטרי ושולחנות XY. מדריכים ומערכות ליניאריות נתונים בדרך כלל הן לכוחות ליניאריים עקב עומסים כלפי מטה, כלפי מעלה וצידיים והן לכוחות סיבוביים עקב עומסים תלויים. כוחות סיבוביים - המכונים גם כוחות מומנט - מוגדרים בדרך כלל כ...קרא עוד -

שלבי/שולחנות מיקום ליניאריים
רובוט קרטזי למערכת גנטרי. שלבי מיקום ושולחנות משמשים במערכות בקרת תנועה כדי להחזיק חומר עבודה ו/או למקם אותו לפעולה כלשהי. שלבים או שולחנות, בין אם ליניאריים או סיבוביים, הם לרוב תת-מערכות תנועה שלמות. כלומר, הם מערכות תנועה בפני עצמן...קרא עוד -
מדריך בחירה למערכות לינאריות
מערכות המונעות על ידי רצועה, מערכות המונעות על ידי בורג כדורי, מערכות המונעות על ידי גלגל שיניים וגלגלי שיניים, מערכות המונעות על ידי מנוע ליניארי, מערכות המונעות על ידי פנאומטיקה. חלפו הימים שבהם מתכנני ובוני מכונות נאלצו לבחור בין בניית מערכת ליניארית משלהם מאפס או הסתפקות במגוון מוגבל של מערכות מורכבות מראש, אשר, במובן מסוים...קרא עוד -
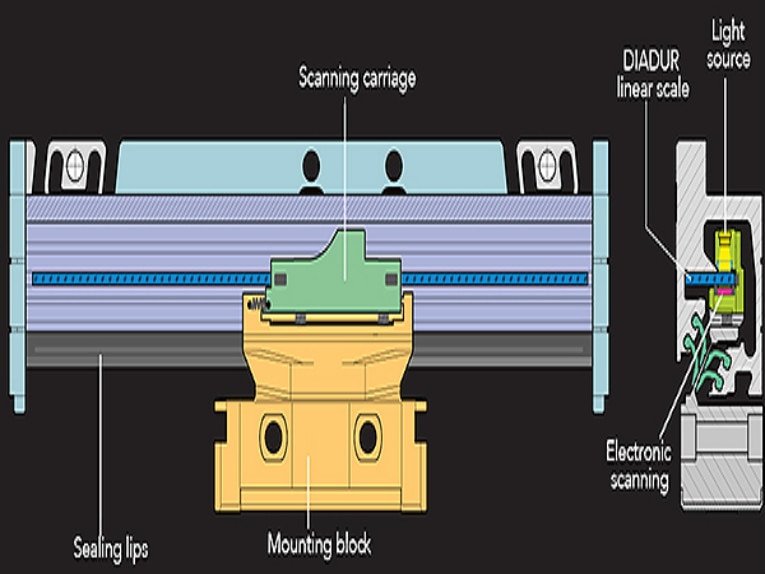
אנקודרים ליניאריים משפרים את הדיוק
אנקודרים ליניאריים משפרים את הדיוק על ידי תיקון שגיאות במורד הזרם של קישורים מכניים. אנקודרים ליניאריים עוקבים אחר מיקום הציר ללא אלמנטים מכניים ביניים. האנקודרים אף מודדים שגיאות העברה מחיבורים מכניים (כגון התקנים מכניים סיבוביים-לינאריים), מה שעוזר לשלוט...קרא עוד -
כיצד להשיג תנועה לינארית צפויה ואמינה
דיוק וחזרתיות, קיבולת, אורך מהלך, שימוש, סביבה סביבתית, תזמון, כיוון, קצב תנועה. הנה כמה טיפים כיצד להגדיר ולקבוע נכון את הגודל של מפעיל המונע על ידי מנוע ליניארי באמצעות המנגנון ACTUATOR - קיצור של accuracy, capacity, travel length, use, ambient environment,...קרא עוד -

שלב ליניארי אופקי ואנכי שלב מיקום ציר Z
שלבי מיקום כיום יכולים לענות על דרישות פלט ספציפיות ותובעניות. הסיבה לכך היא שאינטגרציה מותאמת אישית ותכנות תנועה עדכני עוזרים כעת לשלבים להשיג דיוק וסנכרון מדהימים. יתרה מכך, ההתקדמות בחלקים מכניים ומנועים עוזרת ליצרני ציוד מקורי לתכנן...קרא עוד -
כיצד להקטין את גודלו של מפעיל ליניארי
פתרון לשלבי XY ומרכזי עיבוד שבבי קטנים, כגון מדפסות תלת מימד. מפעילים ליניאריים מגיעים במגוון רחב של גדלים, אך במהלך השנים האחרונות, יצרנים הדגישו יותר ויותר שטח קומפקטי. אך לא משנה כמה קטן המפעיל, הוספת מנוע יכולה להפוך את...קרא עוד -
עדכון מגמות תנועה: שלבי מיצוב מובילים את התכנון הפרגמטי
ההתקדמות העיקרית בתחום התנועה בעשור האחרון התרחשה במערכות בקרה ואלקטרוניקה. שלבי מיקום כיום יכולים לספק דרישות פלט ספציפיות ותובעניות. הסיבה לכך היא שאינטגרציה מותאמת אישית והחידושים העדכניים ביותר בתכנות תנועה עוזרים כיום לשלבים להגיע לדיוק מדהים...קרא עוד -

כיצד לבחור דיוק של מדריך ליניארי
שיקולי הרכבה, בלוק בודד על מסילה אחת, בלוקים מרובים על מסילה אחת, מיסבים מרובים על מסילות מרובות. בבחירת מוביל ליניארי מסחרר, ישנם מספר קריטריונים שיש לציין, כולל גודל, עומס מראש ודיוק. ולמרות שהמונח "דיוק"...קרא עוד -
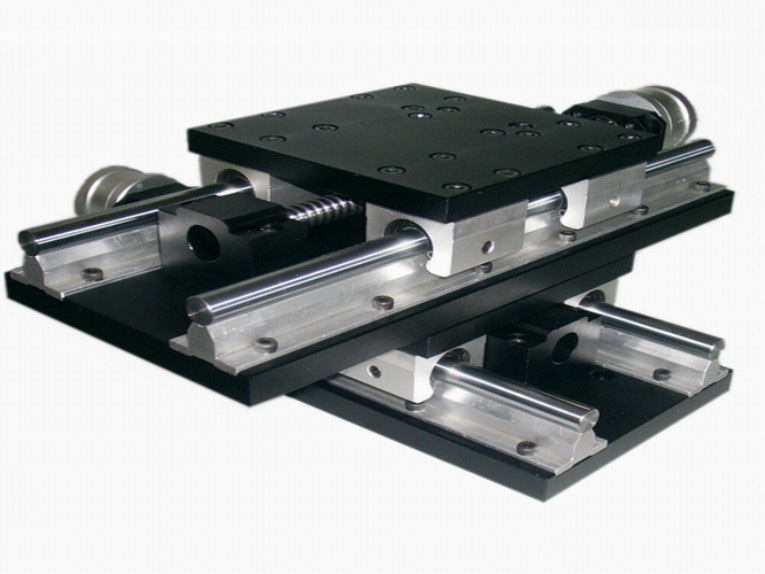
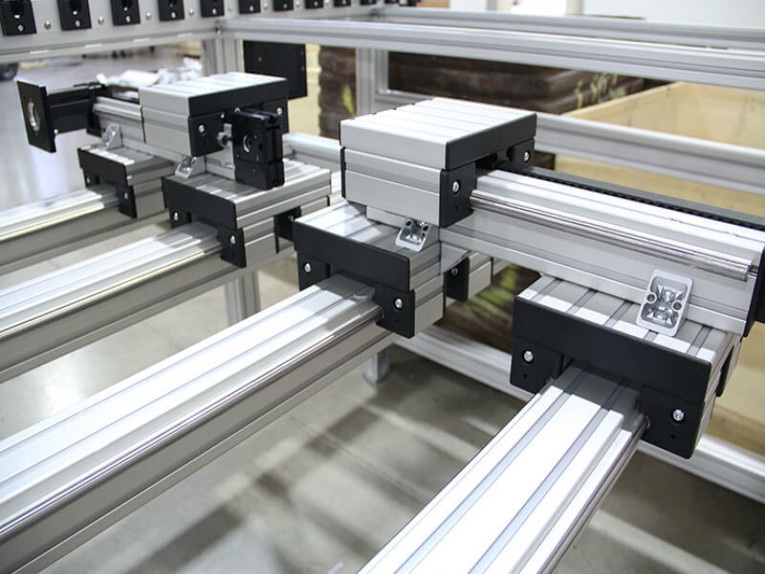
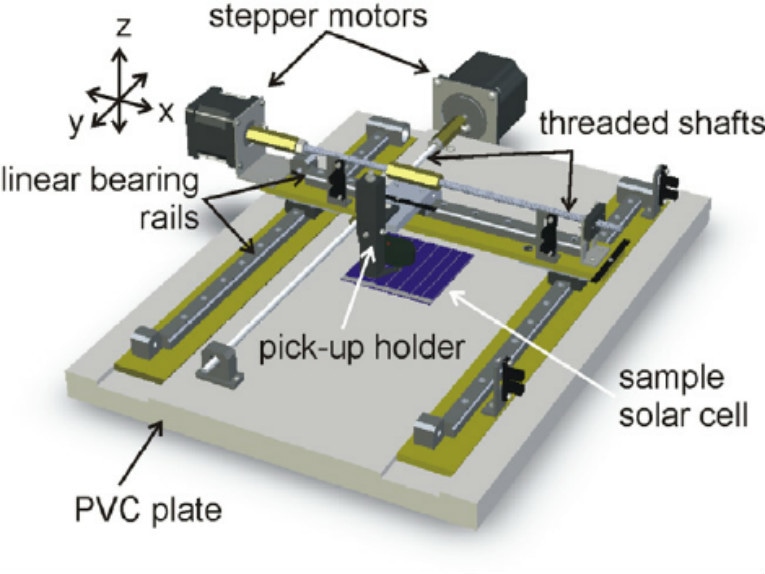
טבלאות XY: במה הן שונות ממערכות קרטזיות ומערכות גנטרי?
עיצוב שולחן XY נפוץ משתמש במגלשות גלילים מוצלבות ובכונן בורג כדורי לדיוק גבוה מאוד של מהלך ומיקום. ישנן דרכים רבות לבנות מערכות ליניאריות לתנועה בכיוונים X, Y ו/או Z - הידועות גם כקואורדינטות קרטזיות. המונחים שאנו משתמשים בהם בדרך כלל כדי להתייחס לאלה...קרא עוד -

מפעילים ליניאריים במהירות גבוהה: מה הופך אותם למהירים?
המהירות תלויה בעיקר במנגנון ההנעה. כמו מונחים רבים המשמשים בתעשיית התנועה הליניארית - "עמידות בפני כבדות", "מיניאטוריות" ו"עמידות בפני קורוזיה", אם למנות רק כמה - אין תקן בתעשייה שמגדיר מה מהווה מפעיל ליניארי "מהיר". אף על פי כן, ישנם כל כך...קרא עוד
