







-
רובוטיקה או בקרת תנועה? זו השאלה.
10 שאלות שיעזרו לכם להחליט. למרות שהגבולות יכולים להיות מטושטשים לעתים קרובות, רובוטיקה ובקרת תנועה אינם אותו דבר. הם קשורים זה לזה במובנים רבים, אך רובוטים נוטים לפתרונות "מהונדסים מראש" יותר בעוד שבקרת תנועה נוטה לפתרונות מודולריים יותר. הפתרון הקטן אך...קרא עוד -
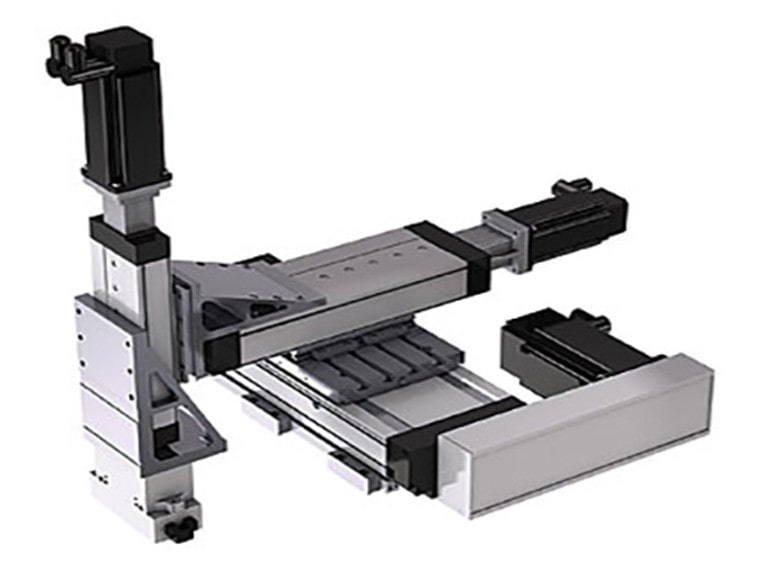
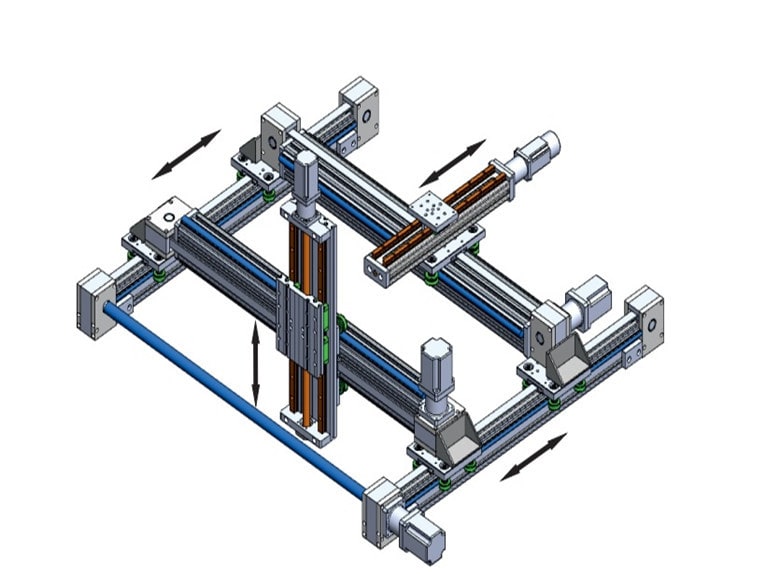
טיפים לבחירת רובוטים קרטזיים מהונדסים מראש
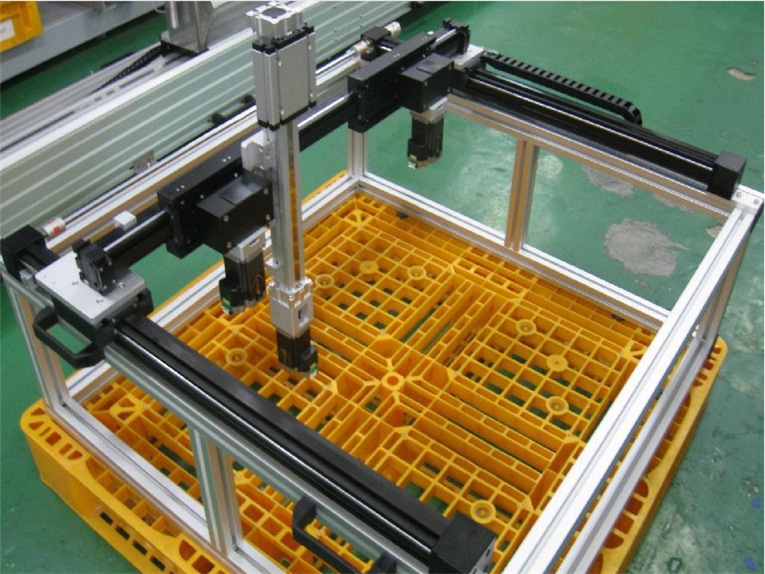
3 שלבים לתכנון מערכת מיקום ליניארית רובוטים קרטזיים פועלים בשניים או שלושה צירים לאורך מערכת הקואורדינטות הקרטזית של X, Y ו-Z. בעוד שרובוטים SCARA ו-6 צירים מוכרים יותר, מערכות קרטזיות ניתן למצוא כמעט בכל יישום תעשייתי שניתן להעלות על הדעת, החל מ...קרא עוד -
מהן שגיאות מישוריות וכיצד הן משפיעות על הדיוק של מערכת תנועה ליניארית?
שגיאות ליניאריות, זוויתיות ומישוריות. בעולם אידיאלי, מערכת תנועה ליניארית תציג תנועה ישרה ושטוחה לחלוטין ותגיע למיקום המיועד ללא שגיאה בכל פעם. אבל אפילו למדריכים ולמנועים ליניאריים בעלי הדיוק הגבוה ביותר (ברגים, מתלים וגלגלי שיניים, רצועות, מנועים ליניאריים) יש כמה...קרא עוד -
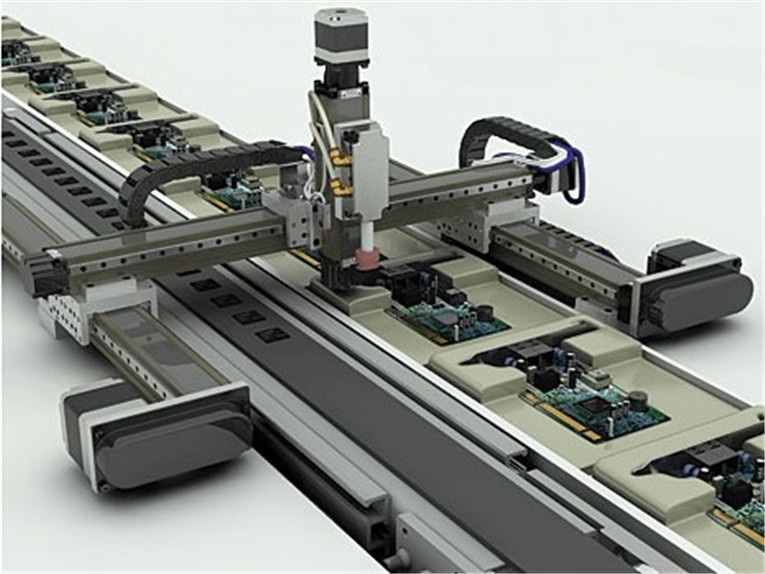
אולר שוויצרי לאוטומציה תעשייתית
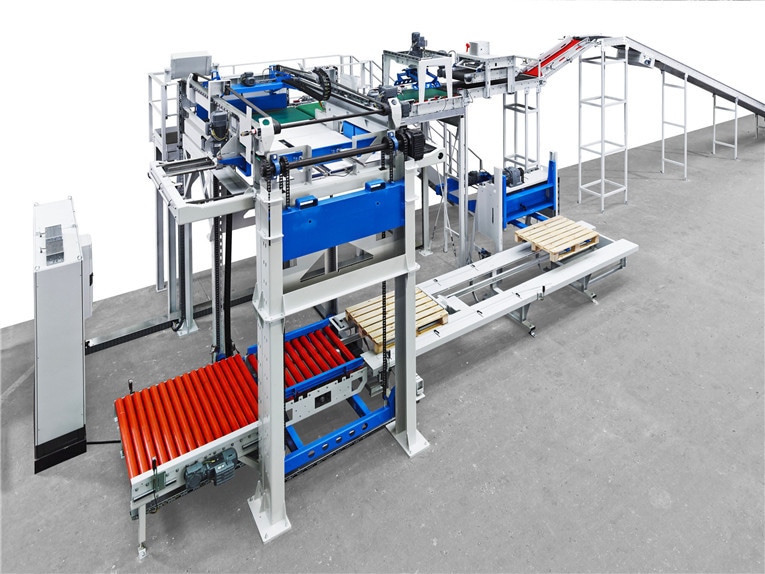
יישומים נפוצים למדריכי מסילות ליניאריות מסילות ליניאריות הן עמוד השדרה של יישומים תעשייתיים רבים, ומספקות הנחיה בחיכוך נמוך וקשיחות גבוהה לעומסים שיכולים לנוע בין גרמים בודדים ועד אלפי קילוגרמים. מגוון הגדלים, רמות הדיוק והעומסים המקדימים שלהם הופכים...קרא עוד -
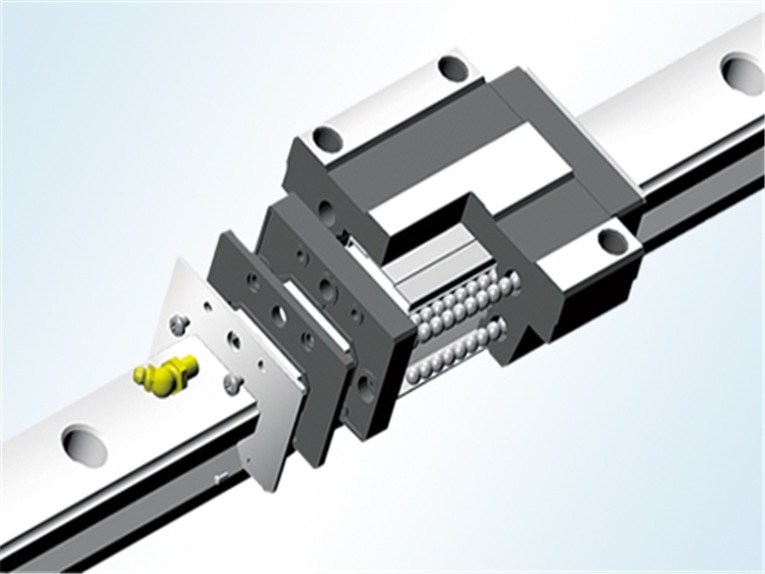
למה להשתמש במדריכים ליניאריים ובברגי כדור עם שרשראות כדוריות?
מאפייני עיצוב מרכזיים עבור מערכת התנועה הליניארית שלך אחד ההבדלים בין מיסבי כדור רדיאליים למובילי כדור ליניאריים מסתובבים היה מבחינה היסטורית שמיסבים רדיאליים משתמשים בדרך כלל בכלוב כדי להפריד את הכדורים ולשלוט בתנועתם, בעוד שמובילי מסילה פרופיליים לא עשו זאת. אבל ...קרא עוד -
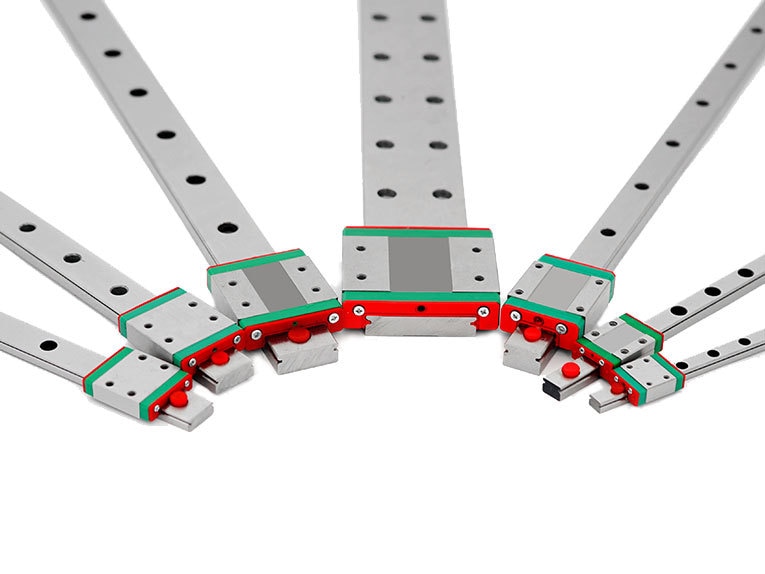
מהם ההבדלים בין מדריכים ליניאריים רגילים למדריכים ליניאריים מתגלגלים?
בחרו בחירה טובה עבור מערכת המיקום הליניארית שלכם. מוביל ליניארי (או מיסב ליניארי) הוא רכיב מכני המאפשר תנועה יחסית בין שני משטחים, כאשר משטח אחד תומך בשני, וחיכוך מינימלי ביניהם. ישנם שני סוגים בסיסיים של מובילים ליניאריים: רגילים ומנועים...קרא עוד -
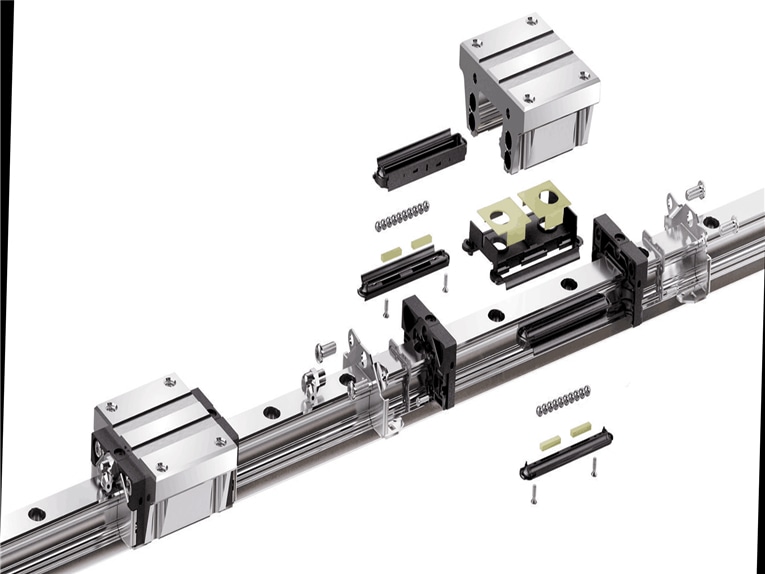
שלוש דרכים יעילות להפחתת עלויות תחזוקה עבור מערכות ליניאריות
החלפת גררת מדריך ליניארית או החלפת מכלול גררה ומסילה מלא. שימון לא מספק עלול לגרום לכשל מיסבים. אך בעוד ששימון הוא גורם התחזוקה החשוב ביותר בחיי המיסב הליניארי, ישנם דברים נוספים שמשתמשים יכולים לעשות כדי להפחית את עלויות התחזוקה ולהבטיח...קרא עוד -
4 פרמטרים עיקריים ליישום - מהלך, עומס, מהירות ודיוק
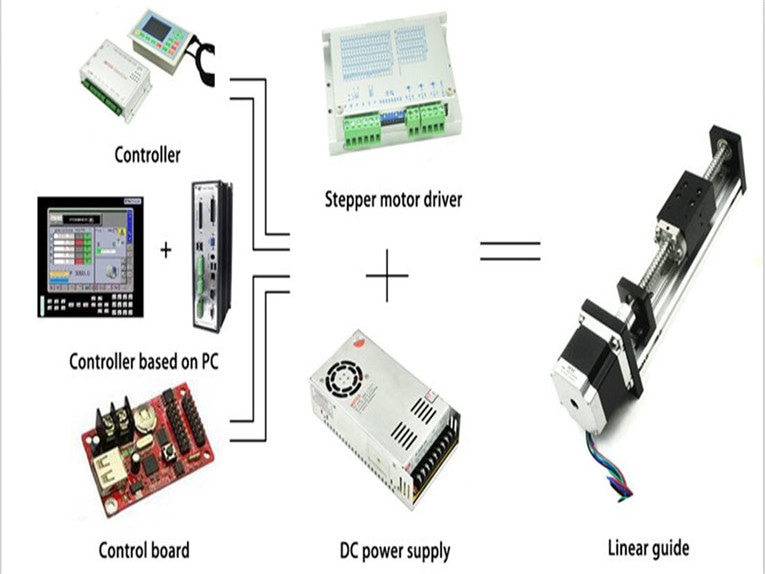
חלפו הימים שבהם מתכנני ובוני מכונות נאלצו לבחור בין בניית מערכת ליניארית משלהם מאפס לבין הסתפקות במגוון מוגבל של מערכות מורכבות מראש, שברוב המקרים לא התאימו באופן מושלם ליישום שלהן. יצרנים מציעים כיום מערכות המבוססות על...קרא עוד -
כיצד לתכנן מערכת תנועה לינארית?
יעילות, דיוק וקשיחות גבוהות. המסלול הקצר ביותר בין שתי נקודות הוא קו ישר. אבל אם אתם מתכננים מערכת תנועה ליניארית, תצטרכו לשקול תמיכה מבנית, מובילים, הנעות, אטמים, סיכה ואביזרים בין נקודות A ו-B. בין אם תחליטו לתכנן...קרא עוד -

שבעה פרמטרים מרכזיים לתכנון מערכת תנועה לינארית אופטימלית וחסכונית
עומס, כיוון, מהירות, מהלך, דיוק, סביבה ומחזור עבודה. ניתוח מדוקדק של היישום, כולל כיוון, מומנט ותאוצה, יחשוף את העומס שיש לתמוך בו. לעיתים, העומס בפועל יהיה שונה מהעומס המחושב, ולכן מהנדסים חייבים לשקול את...קרא עוד -
מנוע סרוו חדשני מדכא רעידות
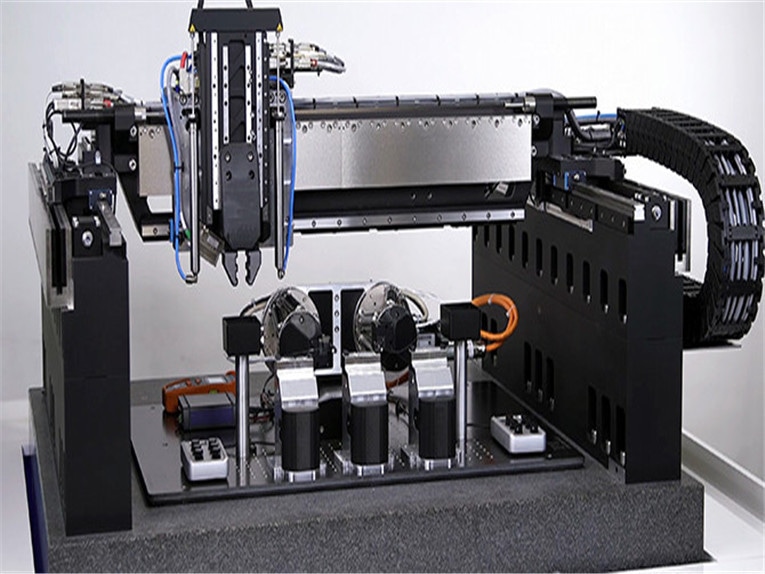
דיכוי רעידות מקטין באופן דרמטי את זמן ההתייצבות. בפעולת איסוף והצבה במהירות גבוהה, זמן ההתייצבות הוא אויב הפרודוקטיביות. מהירות חיונית להרכבה בנפח גבוה. עם זאת, מהירות גם יוצרת בעיות. בפעולת איסוף והצבה, לדוגמה, תנועה מהירה מהצד...קרא עוד -

אל תתעלמו מגורמים אלה בעת בחירת מערכת לינארית
אורך חיי התנועה משמעותי מאוד. בעת קביעת גודל של מערכת ליניארית, פרמטרי היישום הראשונים שעולים בראש הם כנראה מהלך, עומס ומהירות. בנוסף, יש צורך בפרטים על מיקום העומס, פרופיל התנועה ומחזור העבודה על מנת לחשב במדויק את הפוטנציאל השימושי של המיסב...קרא עוד
