








A lógica básica dos cilindros elétricos é fornecer trabalho útil convertendo o movimento rotativo (circular) de um elemento de acionamento em movimento linear (reto). Os modelos de cilindros elétricos diferem de acordo com o tipo de motor que fornecerá o movimento rotativo, o tipo de eixo helicoidal que fornecerá o movimento linear e os tipos de conexão que permitem a combinação desses dois componentes.
Os cilindros elétricos são frequentemente comparados aos cilindros pneumáticos devido às suas áreas de aplicação. Essa comparação também pode ser feita, em alguns casos, com os cilindros hidráulicos. Os três sistemas apresentam vantagens e desvantagens de acordo com suas características. Os usuários devem considerar esses aspectos ao escolher os produtos para sua aplicação. Os atuadores elétricos são utilizados na fabricação de máquinas, na indústria automotiva e seus derivados, na indústria alimentícia, têxtil, de embalagens, em dispositivos médicos, em equipamentos de teste, em robótica e em aplicações eletrônicas. Os cilindros elétricos se diferenciam dos demais sistemas por possuírem uma estrutura mecânica. O movimento é proporcionado por um eixo helicoidal localizado dentro de um corpo. O fuso de esferas permite a transferência de potência, convertendo o movimento circular recebido do motor em movimento linear. Dependendo dos componentes mecânicos utilizados nos cilindros elétricos e do tipo de motor, é possível obter alta precisão de posicionamento, controle de velocidade e controle de força.
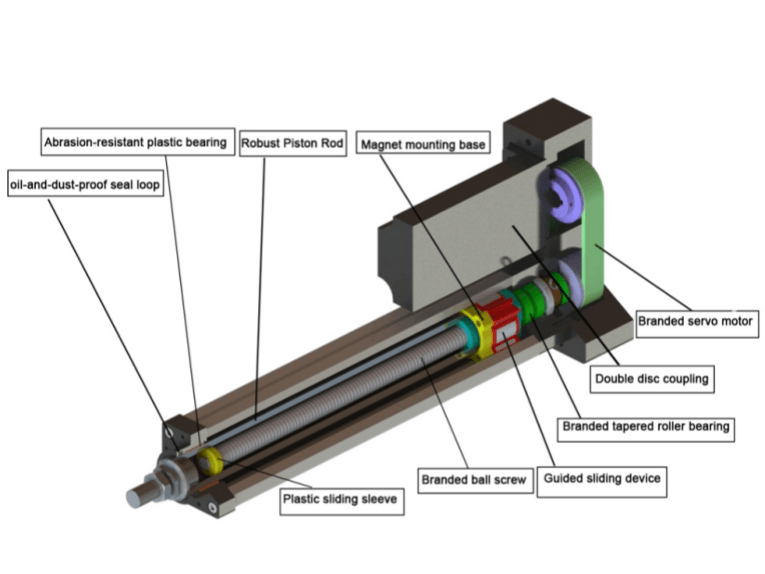
Estrutura do Cilindro Elétrico
A estrutura de um cilindro elétrico consiste basicamente em 3 elementos principais. Embora a parte do cilindro possa ser avaliada separadamente, o motor geralmente é considerado integrado.
1. Cilindro
O cilindro é o elemento que realiza o trabalho, convertendo o movimento circular recebido do motor em movimento linear. Dependendo dos componentes mecânicos utilizados, a capacidade máxima de carga, a precisão de posicionamento, a velocidade máxima e o curso máximo do cilindro variam.
2. Adaptador de Conexão do Motor
Este é o mecanismo que transmite o movimento do motor para o cilindro. Ele conecta o cilindro ao motor. Dependendo da aplicação, o motor pode ser montado axialmente ou paralelamente ao cilindro.
3. Motor
O motor é a principal fonte de energia do cilindro. Ele proporciona o movimento ao cilindro. Cilindros elétricos podem ser usados com a integração de servomotores, motores de passo, motores CC e motores CA.
A força aplicada por um cilindro elétrico com servomotor integrado pode ser controlada sem a necessidade de equipamentos externos. Com um cilindro elétrico com servomotor, é possível realizar posicionamentos de alta precisão em múltiplas posições. O sistema recebe feedback sobre o posicionamento realizado. Os valores de velocidade e aceleração do cilindro elétrico podem ser alterados durante o processo. Todas essas operações podem ser controladas por um CLP (Controlador Lógico Programável). Para outros tipos de geradores de movimento, essas operações são possíveis com a adição de equipamentos externos (sensor, escala linear, etc.).
Características do cilindro elétrico
1. Controle de posição com cilindro elétrico
É possível realizar posicionamentos precisos em mais de uma posição com cilindros elétricos. A precisão do posicionamento do cilindro elétrico depende da precisão do fuso de esferas e do elemento leitor de posição utilizado. O cilindro percorre o passo do fuso de esferas a cada revolução do motor. Assim que o movimento para, o cilindro está posicionado. Controlando o movimento a ser dado ao fuso de esferas, o cilindro pode ser posicionado na posição desejada.
Embora seja possível alcançar uma precisão de posicionamento de 0,02 mm utilizando um eixo de fuso de esferas em cilindros elétricos, esse valor permanece na ordem de 0,1 mm com o uso de um eixo trapezoidal. A seleção do elemento leitor de posição (encoder, escala linear, etc.) deve ser adequada aos valores de precisão de posicionamento desejados.
Com um cilindro elétrico integrado a um servomotor, as informações de posição podem ser lidas sem a necessidade de elementos externos. Essas informações podem ser processadas e avaliadas. O cilindro é posicionado em sua segunda posição após aguardar um tempo em sua primeira posição. O número de posições não se limita a duas, podendo ser aumentado.
Se cilindros elétricos forem usados com motores que não possuem um sensor de posição interno, será necessário um equipamento externo para realizar o controle de posição. O posicionamento pode ser feito controlando o movimento do cilindro com as informações de posição recebidas do equipamento externo.
2. Controle de velocidade com cilindro elétrico
A velocidade do cilindro elétrico depende do passo do fuso de esferas e da velocidade do motor. A velocidade pode ser controlada alterando-se o número de rotações do fuso de esferas. A velocidade também pode ser alterada variando-se a velocidade do motor durante o movimento. As perdas de tempo podem ser eliminadas ajustando-se as acelerações de acordo com a aplicação. Enquanto o cilindro se move a uma velocidade menor para atingir sua posição inicial, após um certo período de tempo, ele se move a uma velocidade maior para atingir sua segunda posição.
3. Controle Elétrico de Aceleração do Cilindro
Ao alterar os valores de aceleração e desaceleração do motor integrado ao cilindro elétrico, é possível controlar a aceleração do cilindro. Isso evita partidas e paradas bruscas sob cargas pesadas. Em aplicações que exigem ciclos rápidos, os tempos de ciclo desejados podem ser alcançados ajustando-se as partidas e paradas rápidas. O cilindro atinge uma determinada velocidade com diferentes valores de aceleração.
4. Controle de força com cilindro elétrico
A força aplicada pelo cilindro elétrico depende da potência do motor utilizada e da estrutura mecânica do cilindro. A força do cilindro pode ser controlada através do controle da potência do motor. Atualmente, cilindros elétricos alcançam forças de até 300 kN.
A força pode ser controlada utilizando o modo de torque do motor no cilindro elétrico com servomotor integrado. O cilindro pode ser tensionado por uma determinada força, permanecendo constante sob essa condição. As informações de força e posição podem ser lidas, processadas e avaliadas. Dependendo da sensibilidade desejada na medição da força, pode ser necessário utilizar um sensor de força. Essas informações podem ser obtidas utilizando o sensor de força quando o motor é operado sem o modo de torque ativado no cilindro elétrico.
Os cilindros elétricos são um dos frutos do desenvolvimento da alta tecnologia e da 4ª Revolução Industrial. O uso generalizado de sistemas inteligentes com alto número de ciclos, permitindo a produção de diferentes produtos na mesma máquina, e baixos custos operacionais, aumenta a necessidade de cilindros elétricos. Prevê-se que esses produtos ocuparão um lugar de destaque no mercado ao longo do tempo, pois oferecem diversas vantagens em comparação com os cilindros hidráulicos. Os cilindros elétricos são independentes de outros sistemas e possuem uma estrutura mecânica. O movimento é proporcionado por um eixo helicoidal localizado dentro de um corpo. O fuso de esferas permite a transferência de potência, convertendo o movimento circular recebido do motor em movimento linear. Dependendo dos componentes mecânicos utilizados nos cilindros elétricos e do tipo de motor, é possível obter alta precisão de posicionamento, controle de velocidade e controle de força. Além dos benefícios que proporcionam ao usuário, os cilindros elétricos são produtos ecologicamente corretos. Em termos de eficiência energética, uma das nossas maiores responsabilidades atuais, os cilindros elétricos são muito sensíveis em comparação com outros sistemas. Após 2000 horas de testes nas mesmas condições de carga e velocidade, o cilindro elétrico demonstrou ser 11 vezes mais eficiente em termos de consumo de energia do que o cilindro pneumático.
Data da publicação: 18 de maio de 2026