








У класичній фізиці чотири основні типи руху визначаються як лінійний, обертальний, зворотно-поступальний та коливальний. Коли вони застосовуються до механічних пристроїв, ця природна фізична поведінка перетворює рух на силу. Ця сила або потужність потім використовується для створення певної форми вихідного руху, який приводить в рух обладнання або машини. У промисловій автоматизації ми використовуємо широкий спектр обладнання, яке використовує ці різні типи систем руху, зазвичай обертальні або лінійні, але іноді їх комбінацію.
Лінійний рух
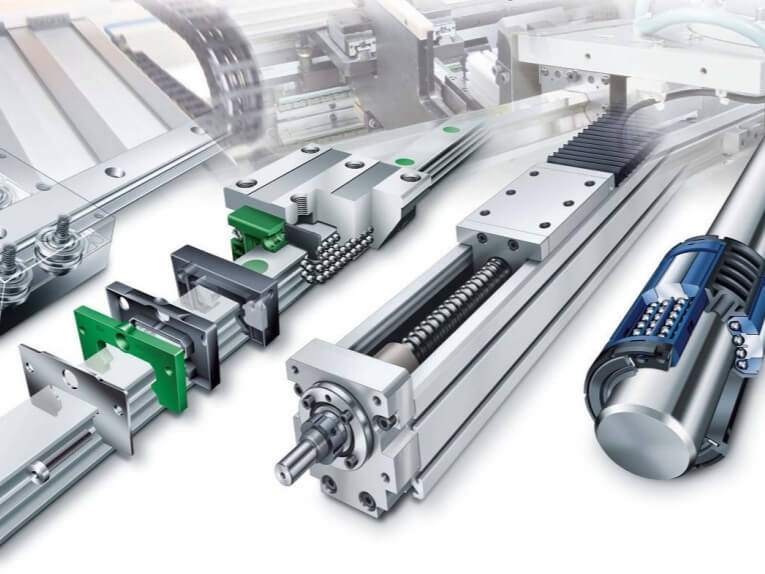
Лінійний рух – це найпростіша та найфундаментальніша форма руху, що характеризується зміною положення людини в одному напрямку. Уявіть собі це як людину, яка йде, плаває або бігає по прямій лінії, або як механічний об'єкт, наприклад, транспортний засіб, що рухається по прямій колії. Система лінійного руху базується на певному механізмі, який переміщує вантаж вздовж однієї осі. У пневматиці вантажі приводяться в рух по прямій лінії за допомогою таких пристроїв, як лінійні двигуни, повзуни або приводи, або кулькові гвинтові вузли. Цей тип системи руху найчастіше використовується в таких сферах застосування, як обробка матеріалів, обробка на верстатах з ЧПК, упаковка, палетування та робототехніка.
Типи лінійних приводів
Різні технології приводів використовують лінійний рух, кожна зі своїми перевагами
1. Лінійні двигунистворюють прямий лінійний рух. Вони можуть швидко розганятися до високих швидкостей і не потребують механічного перетворення. Вони дуже добре підходять для застосувань типу «захоплення та розміщення».
2. Лінійні напрямніТакі напрямні, як роликові або рейкові, забезпечують плавний лінійний рух з низьким тертям. Вони часто використовуються в автоматизації та верстатах для підтримки важких вантажів.
3. Кулькові гвинтиперетворюють обертальні рухи на лінійні. Вони надзвичайно точні та ефективні і широко використовуються в робототехніці та таких застосуваннях, як верстати з ЧПК.
4. Рейкові та шестерні системизабезпечують високу потужність та великі відстані переміщення, використовуючи зубчасті передачі для перетворення обертального руху в лінійний. Цей тип приводу ви знайдете в портальних системах та великогабаритному обладнанні.
Обертальний рух
Найпростішою формою обертального руху є колесо, коли щось обертається в будь-якому напрямку навколо центральної осі або точки повороту. Рух може бути самогенерованим, як торнадо або обертання Землі, але в системах автоматизації він створюється обертальними приводами, системами з зубчастим приводом або поворотними столами.
Поворотний привід генерує енергію в радіусі, який може бути частковим кутом кола або повним безперервним обертом. Системи обертального руху використовуються в турбінах для вироблення енергії з вітру, води або пари, шпинделях верстатів, свердлильних або шліфувальних інструментах, з'єднаннях роботів та індексних столах.
Типи роторних приводів
Роторні пристрої класифікуються за джерелом живлення або енергії, включаючи ручні, електричні або рідинні (гідравлічні або пневматичні).
1. Ручні приводистворюють обертальний рух за допомогою системи зубчастих передач, зазвичай ручного колеса, яке передає енергію обертання через зубчасту передачу до виконавчого елемента. Механічний крутний момент зменшує зусилля, необхідні для переміщення великого вантажу.
2. Електричні роторні приводизазвичай працюють від двигуна, що керує системою шестерень. Вони, як правило, є реверсивними та можуть генерувати кутове обертання або коливання. Електричний контролер регулює вхідний струм двигуна, тому він може змінювати прискорення та швидкість.
3. Рідинні обертальні приводивикористовувати стиснене повітря або рідину для створення руху. Існує багато способів зробити це, зокрема за допомогою рейкової передачі, тиску на лопатку або діафрагму, або поршнево-обертової системи зчеплення, яка називається скотч-хомут.
Комбіновані системи руху
Більш складні завдання створюють систему з комбінації типів руху, найчастіше лінійного та обертального. Ви знайдете їх у таких застосуваннях, як операції переміщення та робототехніка, де вони використовуються для різних типів роботів та деяких роботизованих маніпуляторів. Ви також побачите технологічні досягнення в рішеннях для багатоосьового керування рухом та складного електронного програмування.
Комбіновані приводи руху
Для досягнення точного руху за допомогою комбінованих приводів руху основними рішеннями є шестерні, ремінні передачі та ходові гвинти. Кожне рішення має свої сильні та слабкі сторони, включаючи повторюваність, швидкість позиціонування, точність та вартість.
1. Шестерні– це механічні пристрої, що передають крутний момент за допомогою з'єднувальних зубців. Зуби в зубчастому механізмі входять у зачеплення з сумісними зубчастими деталями в іншій шестерні або приводі, створюючи обертальну силу. Шестерні зазвичай круглі, із зубчастою окружністю, але також можливо розмістити зубці на внутрішньому діаметрі шестерні. Такі конструкції зазвичай використовуються в пристроях, критично важливих до простору та ваги, і забезпечують високий ступінь контролю крутного моменту та швидкості. Дві або більше шестерень, що входять у зачеплення, також можуть працювати послідовно як зубчастий механізм для передачі обертального руху, зазвичай приводячись у дію двигуном.
2. Ремінні передачізазвичай складаються з гнучкої круглої стрічки або ременя, що з'єднує пару шківів. Вони приводяться в рух двигуном, і їхній циклічний рух передає обертальну силу з одного місця в інше. Вони дуже корисні для застосувань, де потрібно переміщатися на великі відстані, будучи легшими, тихішими, дешевшими та ефективнішими в експлуатації, ніж шестерні. Найпоширеніше застосування ремінних передач - конвеєрні системи та кулачкові ремені для двигунів.
3. Як кульовий гвинт,Ходові гвинти або силові гвинти перетворюють обертальний рух гвинта або гайки на лінійний рух. Ходові гвинти та гайки використовують гвинтову різьбу для перетворення руху, тому їх також часто називають гвинтами перетворення. Вони бувають різних розмірів і значень, тому ви можете визначити, який рух буде забезпечено за один оберт гвинта. Це робить їх придатними для використання як у приводах, що вимагають високої точності та швидкості, таких як головка зчитувача дисків, так і в тих, що потребують низької швидкості та високого крутного моменту, таких як лещата. Ходові гвинти також добре підходять для застосувань, що потребують передачі високого навантаження або точного руху, і зазвичай використовуються в хобійному обладнанні та робототехніці.
Який тип руху слід обрати?
Тип системи руху, яку ви використовуєте, значною мірою залежить від вашої програми та робочого середовища. Скільки у вас є місця або яку відстань потрібно подолати? Інші фактори, які слід враховувати, включають необхідну точність і швидкість, а також силу, необхідну для виконання завдання. Вибір лінійних, обертових або комбінованих систем руху може вимагати деяких складних розрахунків. Якщо у вас є сумніви або вам потрібна допомога, не соромтеся звертатися до наших експертів у FUYU Motion.
Час публікації: 23 вересня 2025 р.