







-
Moteur linéaire vs. vis à billes
Une application économique pour votre propre conception. Bien que les moteurs linéaires sans fer soient utilisés dans les applications semi-conducteurs et électroniques depuis plus d'une décennie, ils sont encore perçus par de nombreux concepteurs et équipementiers comme des produits de niche. Or, cette perception des moteurs linéaires comme une solution coûteuse pour…En savoir plus -
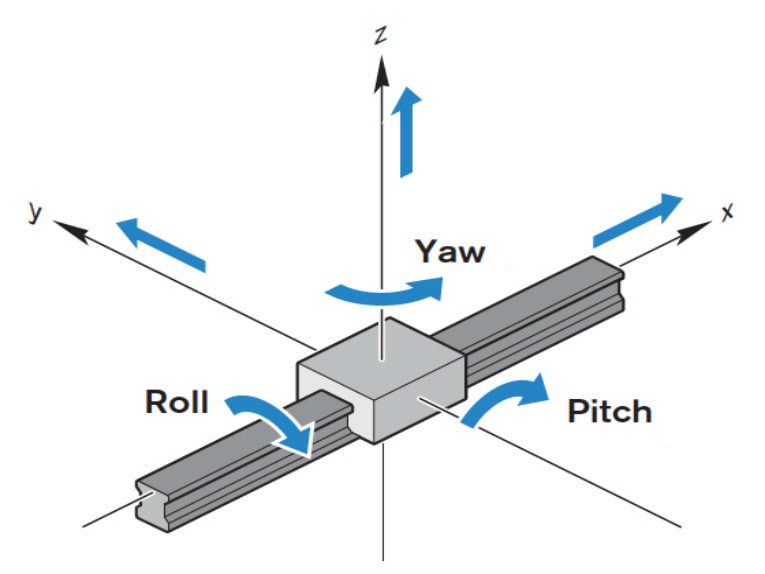
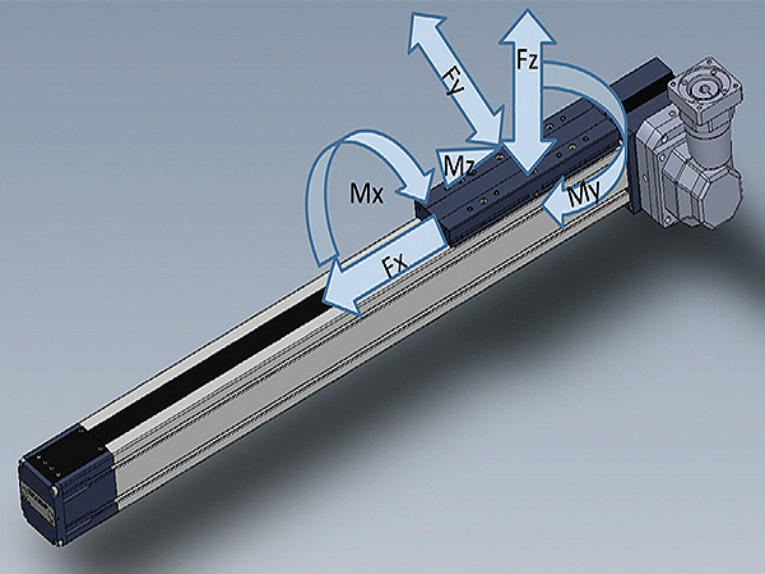
Notions de base du mouvement : Comment définir le roulis, le tangage et le lacet pour les systèmes linéaires
Cela inclut les robots cartésiens, les systèmes portiques et les tables XY. Les guidages et systèmes linéaires sont généralement soumis à des forces linéaires dues aux charges verticales (vers le bas, vers le haut et latérales) et à des forces de rotation dues aux charges en porte-à-faux. Les forces de rotation, également appelées moments de rotation, sont généralement définies comme…En savoir plus -

Tables/plateformes de positionnement linéaire
Dans les systèmes de commande de mouvement, les plateformes et tables de positionnement cartésiennes pour systèmes portiques servent à maintenir une pièce en place et/ou à la positionner pour une opération donnée. Qu'elles soient linéaires ou rotatives, ces plateformes ou tables constituent généralement des sous-systèmes de mouvement complets, c'est-à-dire des systèmes de mouvement à part entière.En savoir plus -
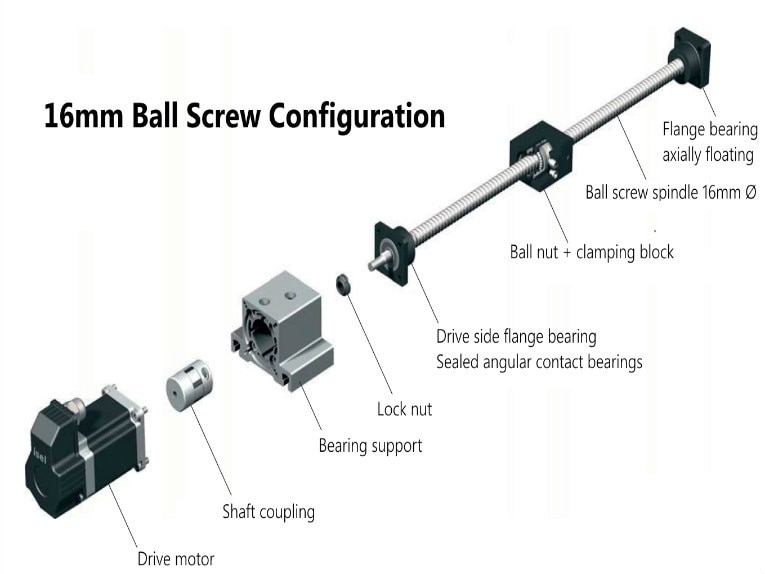
Guide de sélection des systèmes linéaires
Systèmes à courroie, à vis à billes, à crémaillère et pignon, à moteur linéaire, pneumatiques : fini le temps où les concepteurs et constructeurs de machines devaient choisir entre construire leur propre système linéaire de A à Z ou se contenter d’une gamme limitée de systèmes pré-assemblés qui, en général…En savoir plus -
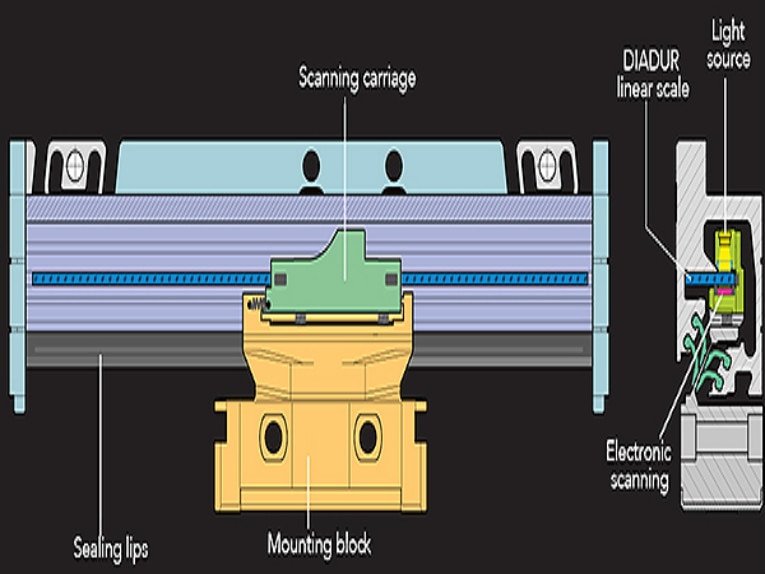
Les codeurs linéaires améliorent la précision
Les codeurs linéaires améliorent la précision en corrigeant les erreurs en aval des liaisons mécaniques. Ils suivent la position de l'axe sans éléments mécaniques intermédiaires. Ces codeurs mesurent même les erreurs de transmission des liaisons mécaniques (telles que les dispositifs mécaniques rotatifs-linéaires), ce qui contribue à limiter…En savoir plus -
Comment obtenir un mouvement linéaire prévisible et fiable
Précision et répétabilité, capacité, course, utilisation, environnement ambiant, synchronisation, orientation, vitesses. Voici quelques conseils pour dimensionner correctement un actionneur linéaire à l'aide du mnémonique ACTUATOR (précision, capacité, course, utilisation, environnement ambiant, etc.).En savoir plus -

Platine linéaire horizontale et verticale, platine de positionnement sur l'axe Z
Les systèmes de positionnement actuels répondent à des exigences de production spécifiques et élevées. En effet, l'intégration personnalisée et les dernières avancées en matière de programmation de mouvement permettent d'atteindre une précision et une synchronisation exceptionnelles. De plus, les progrès réalisés dans le domaine des composants mécaniques et des moteurs aident les équipementiers à anticiper…En savoir plus -
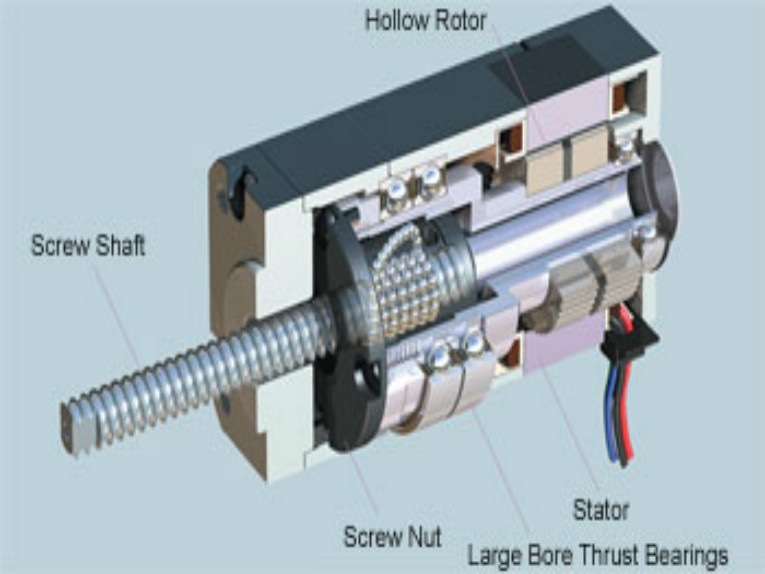
Comment réduire la taille d'un actionneur linéaire
Solution pour les systèmes XY et les petits centres d'usinage, tels que les imprimantes 3D. Les actionneurs linéaires existent dans une large gamme de tailles, mais ces dernières années, les fabricants ont privilégié des formats toujours plus compacts. Cependant, quelle que soit la taille de l'actionneur, l'ajout d'un moteur peut…En savoir plus -
Actualités sur les tendances en matière de mouvement : les étapes de positionnement favorisent une conception pragmatique
Ces dix dernières années, les principales avancées dans le domaine du mouvement ont concerné les systèmes de commande et l'électronique. Les plateformes de positionnement actuelles peuvent répondre à des exigences de sortie spécifiques et élevées. En effet, l'intégration personnalisée et les dernières technologies de programmation de mouvement permettent désormais aux plateformes d'atteindre une précision incroyable.En savoir plus -

Comment choisir la précision d'un guide linéaire
Considérations de montage : bloc unique sur un rail unique, blocs multiples sur un rail unique, roulements multiples sur plusieurs rails. Lors du choix d’un guidage linéaire à recirculation, plusieurs critères doivent être spécifiés, notamment la taille, la précharge et la précision. Et bien que le terme « précision »…En savoir plus -
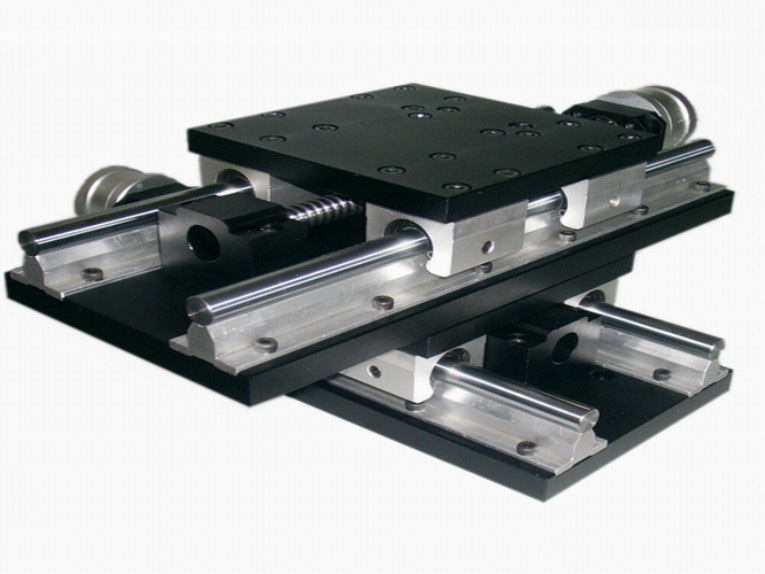
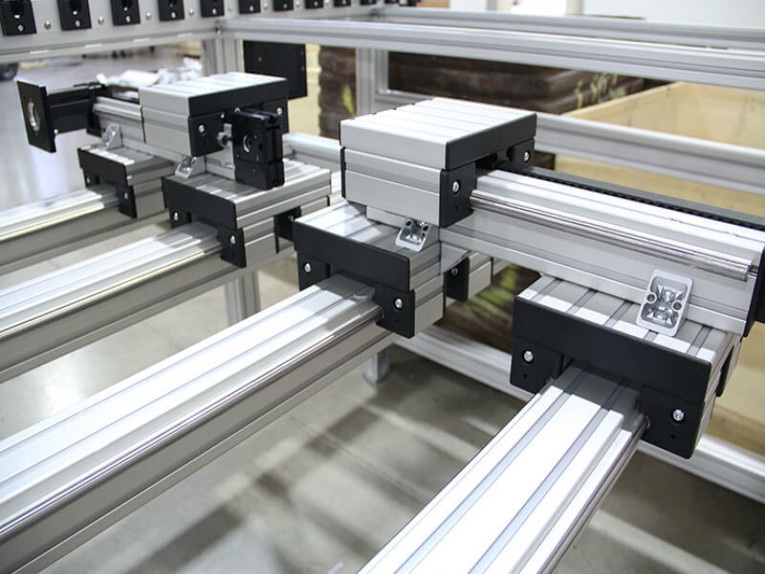
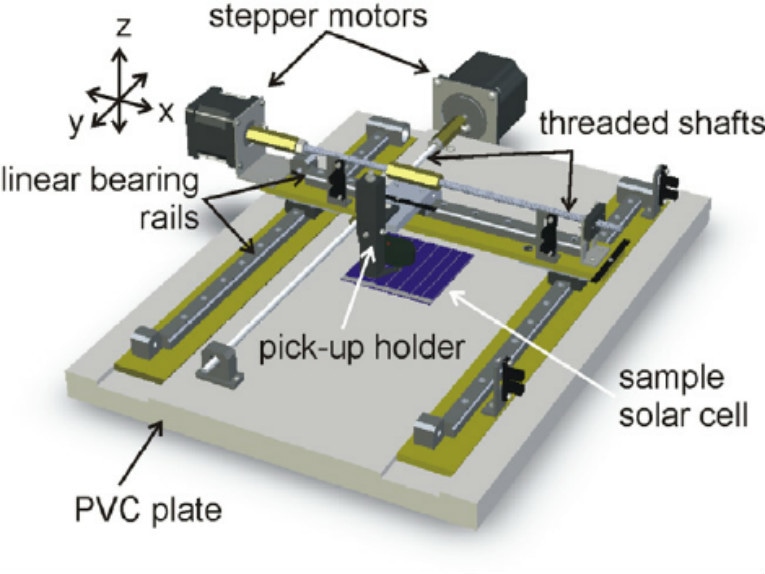
Tables XY : en quoi diffèrent-elles des systèmes cartésiens et des systèmes à portique ?
Une table XY classique utilise des glissières à rouleaux croisés et une vis à billes pour une grande précision de déplacement et de positionnement. Il existe de nombreuses façons de concevoir des systèmes linéaires pour le mouvement selon les axes X, Y et/ou Z (également appelés coordonnées cartésiennes). La terminologie généralement employée pour désigner ces systèmes est la suivante :En savoir plus -

Actionneurs linéaires à grande vitesse : qu’est-ce qui les qualifie de « grande vitesse » ?
La vitesse dépend principalement du mécanisme d'entraînement. À l'instar de nombreux termes utilisés dans le secteur du mouvement linéaire – « robuste », « miniature » et « résistant à la corrosion », pour n'en citer que quelques-uns – il n'existe pas de norme industrielle définissant ce qu'est un actionneur linéaire « haute vitesse ». Néanmoins, il en existe de nombreux…En savoir plus
