







-
लीनियर मोटर बनाम बॉल स्क्रू
आपके स्वयं के डिज़ाइन के लिए किफ़ायती अनुप्रयोग। हालाँकि आयरनलेस लीनियर मोटर्स का उपयोग सेमीकंडक्टर और इलेक्ट्रॉनिक अनुप्रयोगों में एक दशक से अधिक समय से किया जा रहा है, फिर भी कई डिज़ाइनर और OEM इन्हें "विशिष्ट" उत्पाद मानते हैं। लेकिन लीनियर मोटर्स को एक महँगे समाधान के रूप में देखने की धारणा...और पढ़ें -
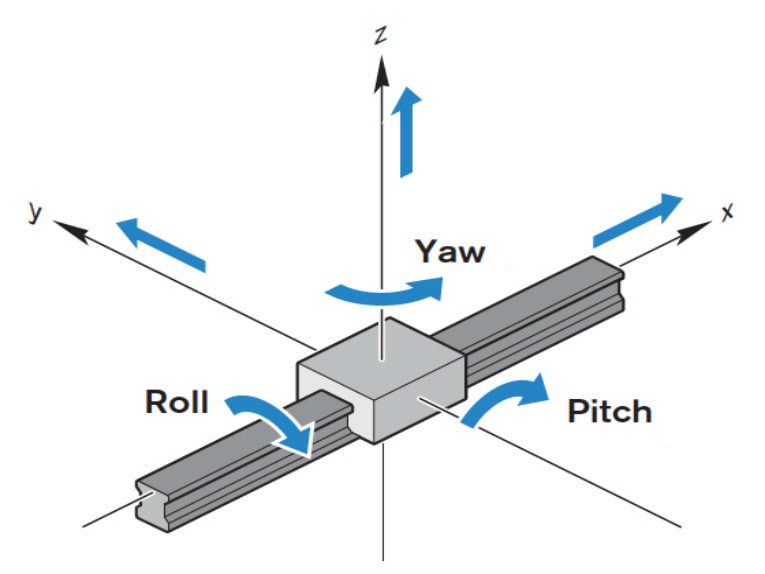
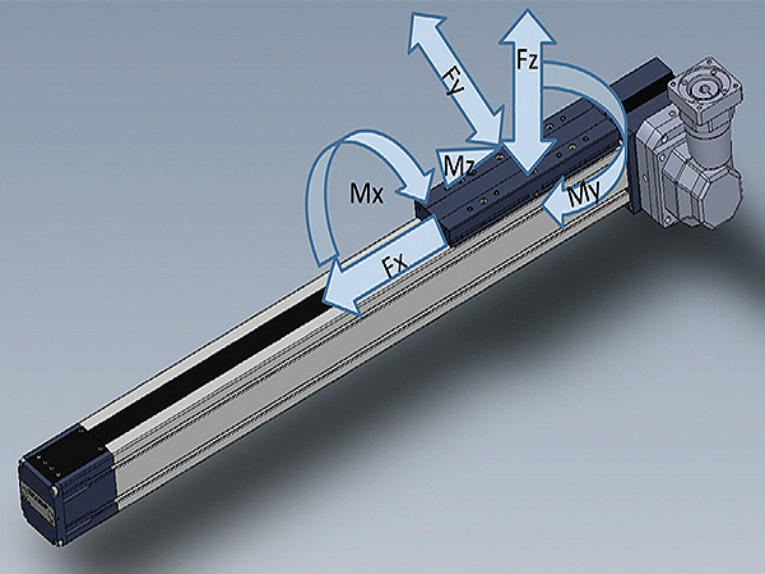
गति की मूल बातें: रैखिक प्रणालियों के लिए रोल, पिच और यॉ को कैसे परिभाषित करें
कार्टेशियन रोबोट, गैन्ट्री सिस्टम और XY टेबल सहित। लीनियर गाइड और सिस्टम आमतौर पर नीचे, ऊपर और पार्श्व भार के कारण लीनियर बलों और ओवरहंग भार के कारण घूर्णी बलों दोनों के अधीन होते हैं। घूर्णी बलों - जिन्हें मोमेंट बल भी कहा जाता है - को आमतौर पर इस प्रकार परिभाषित किया जाता है...और पढ़ें -

रेखीय स्थिति निर्धारण चरण/टेबल
गैन्ट्री सिस्टम के लिए कार्टेशियन रोबोट। मोशन कंट्रोल सिस्टम में वर्कपीस को स्थिर रखने और/या किसी ऑपरेशन के लिए उसे सही स्थिति में लाने के लिए स्टेज और टेबल का उपयोग किया जाता है। लीनियर या रोटरी, ये स्टेज या टेबल अक्सर पूर्ण मोशन सब-सिस्टम होते हैं। यानी, वे स्वयं मोशन सिस्टम होते हैं...और पढ़ें -
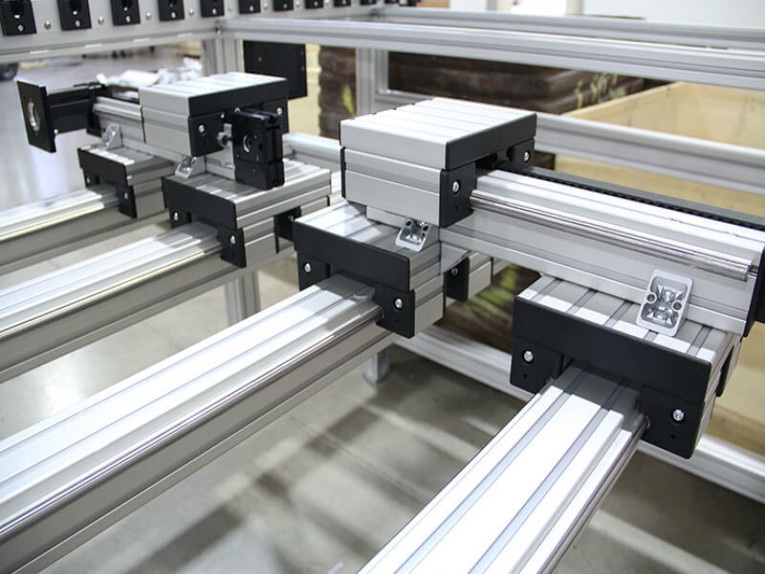
रेखीय प्रणालियों के लिए चयन मार्गदर्शिका
बेल्ट चालित, बॉल स्क्रू चालित, रैक और पिनियन चालित, लीनियर मोटर चालित, न्यूमेटिक चालित प्रणालियाँ। वे दिन बीत गए जब मशीन डिज़ाइनरों और निर्माताओं को या तो अपनी लीनियर प्रणाली को शुरू से स्वयं बनाने या पहले से असेंबल की गई प्रणालियों की सीमित श्रृंखला से संतुष्ट होने के बीच चुनाव करना पड़ता था...और पढ़ें -
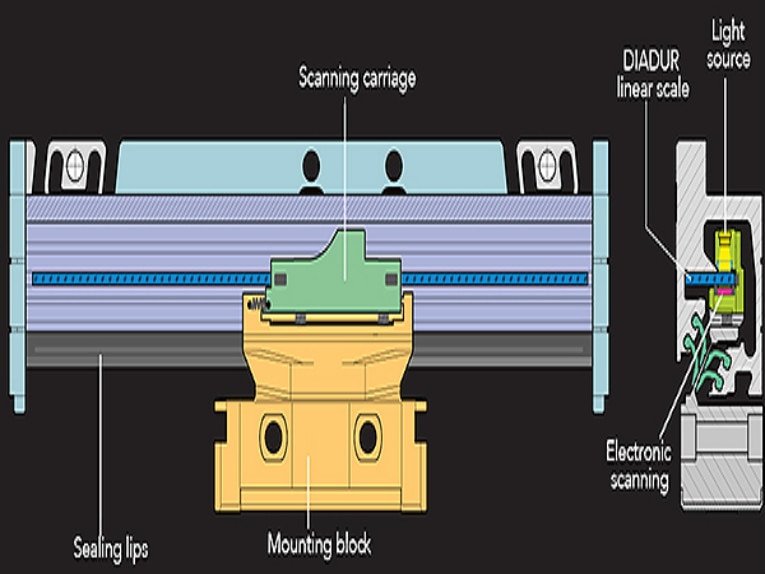
लीनियर एनकोडर सटीकता में सुधार करते हैं
लीनियर एनकोडर यांत्रिक लिंकेज के बाद की त्रुटियों को ठीक करके सटीकता बढ़ाते हैं। लीनियर एनकोडर मध्यवर्ती यांत्रिक तत्वों के बिना अक्ष की स्थिति को ट्रैक करते हैं। ये एनकोडर यांत्रिक लिंकेज (जैसे घूर्णी से रेखीय यांत्रिक उपकरण) से स्थानांतरण त्रुटियों को भी मापते हैं, जिससे सटीकता को नियंत्रित करने में मदद मिलती है...और पढ़ें -
पूर्वानुमानित और विश्वसनीय रैखिक गति कैसे प्राप्त करें
सटीकता और दोहराव, क्षमता, यात्रा की लंबाई, उपयोग, परिवेश, समय, अभिविन्यास, दरें। ACTUATOR (सटीकता, क्षमता, यात्रा की लंबाई, उपयोग, परिवेश) का संक्षिप्त रूप, रैखिक-मोटर-चालित एक्चुएटर को सही ढंग से निर्दिष्ट और आकार देने के कुछ सुझाव यहां दिए गए हैं।और पढ़ें -

क्षैतिज और ऊर्ध्वाधर रैखिक स्टेज Z अक्ष स्थिति निर्धारण स्टेज
आज के समय में पोजिशनिंग स्टेज विशिष्ट और चुनौतीपूर्ण आउटपुट आवश्यकताओं को पूरा कर सकते हैं। ऐसा इसलिए है क्योंकि अनुकूलित एकीकरण और मोशन प्रोग्रामिंग में नवीनतम तकनीक की मदद से स्टेज अविश्वसनीय सटीकता और सिंक्रोनाइज़ेशन प्राप्त कर सकते हैं। इसके अलावा, यांत्रिक पुर्जों और मोटरों में हुई प्रगति से OEM को भविष्य की योजनाओं को बेहतर बनाने में मदद मिल रही है...और पढ़ें -
लीनियर एक्चुएटर का आकार कैसे छोटा करें
XY स्टेज और छोटे मशीनिंग सेंटर, जैसे कि 3D प्रिंटर, के लिए समाधान। लीनियर एक्चुएटर कई आकारों में आते हैं, लेकिन पिछले कुछ वर्षों में, निर्माता अधिक से अधिक कॉम्पैक्ट आकार पर जोर दे रहे हैं। लेकिन एक्चुएटर कितना भी छोटा क्यों न हो, मोटर जोड़ने से इसकी क्षमता बढ़ सकती है...और पढ़ें -
मोशन ट्रेंड्स अपडेट: व्यावहारिक डिजाइन की दिशा में पोजिशनिंग स्टेजेस का अग्रणी योगदान
पिछले दशक में गति के क्षेत्र में मुख्य प्रगति नियंत्रण प्रणालियों और इलेक्ट्रॉनिक्स में हुई है। आज पोजिशनिंग स्टेज विशिष्ट और चुनौतीपूर्ण आउटपुट आवश्यकताओं को पूरा कर सकते हैं। ऐसा इसलिए है क्योंकि अनुकूलित एकीकरण और गति प्रोग्रामिंग में नवीनतम तकनीक अब स्टेज को अविश्वसनीय सटीकता प्राप्त करने में मदद करती है...और पढ़ें -

लीनियर गाइड की सटीकता कैसे चुनें
माउंटिंग संबंधी विचार, एक रेल पर एक ब्लॉक, एक रेल पर कई ब्लॉक, कई रेलों पर कई बेयरिंग। रीसर्कुलेटिंग लीनियर गाइड का चयन करते समय, आकार, प्रीलोड और सटीकता सहित कई मापदंड निर्दिष्ट करने की आवश्यकता होती है। और यद्यपि "सटीकता" शब्द...और पढ़ें -
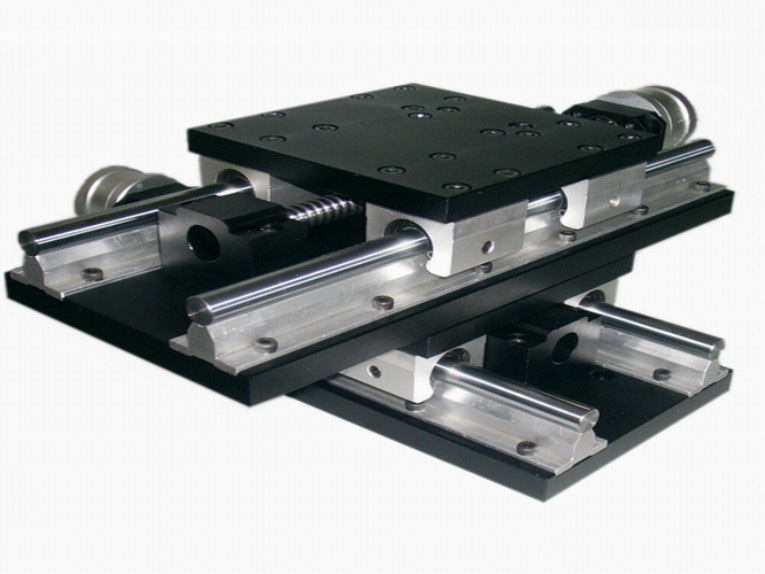
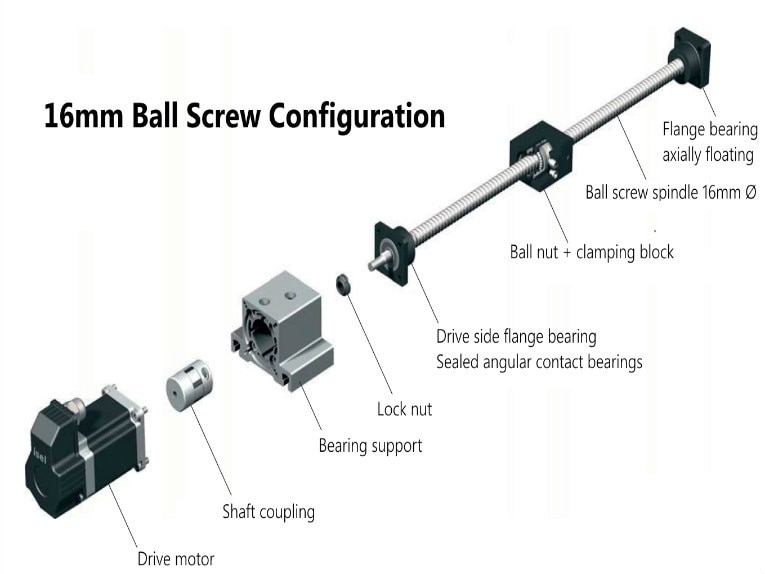
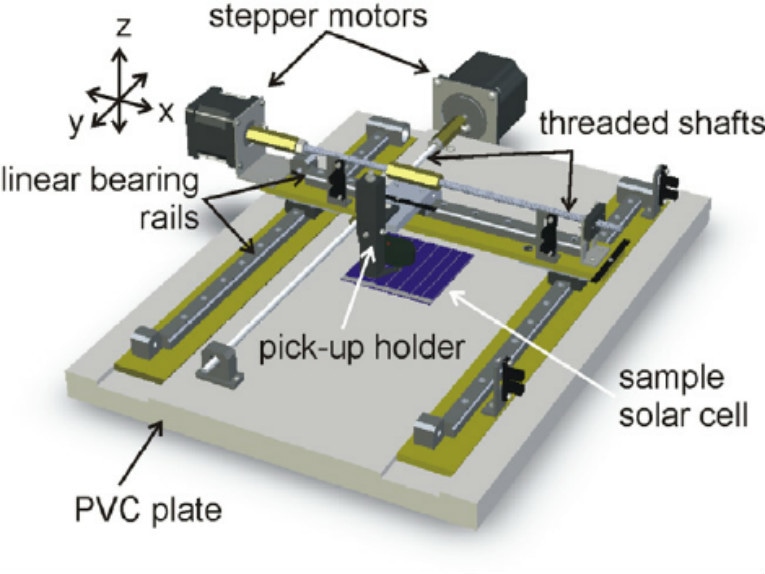
XY टेबल: ये कार्टेशियन और गैन्ट्री सिस्टम से किस प्रकार भिन्न हैं?
एक सामान्य XY टेबल डिज़ाइन में उच्च गति और सटीक स्थिति निर्धारण के लिए क्रॉस रोलर स्लाइड और बॉल स्क्रू ड्राइव का उपयोग किया जाता है। X, Y और/या Z दिशाओं में गति के लिए रैखिक प्रणालियाँ बनाने के कई तरीके हैं - जिन्हें कार्टेशियन निर्देशांक भी कहा जाता है। इन प्रणालियों को संदर्भित करने के लिए हम आमतौर पर जिन शब्दों का उपयोग करते हैं...और पढ़ें -

हाई स्पीड लीनियर एक्चुएटर्स: इन्हें हाई स्पीड की श्रेणी में कौन से कारक शामिल करते हैं?
गति मुख्य रूप से ड्राइव तंत्र पर निर्भर करती है। रैखिक गति उद्योग में उपयोग किए जाने वाले कई शब्दों की तरह – जैसे “हेवी ड्यूटी”, “मिनीएचर” और “जंग-प्रतिरोधी”, आदि – कोई उद्योग मानक नहीं है जो यह निर्दिष्ट करता हो कि “उच्च गति” रैखिक एक्चुएटर क्या होता है। फिर भी, ऐसे कई एक्चुएटर मौजूद हैं...और पढ़ें
