








油圧システムは長寿命ですが、電気システムほど効率的ではありません。電気システムは、より効率的な動作で、位置、速度、および速度制御を正確に行うことができます。また、閉ループ環境で動作するためデータ収集が容易で、事実上メンテナンスフリーです。
実際、電動ロッド式アクチュエータがハイエンド油圧システムに匹敵する力を発生できるようになるにつれ、多くの用途において油圧システムの代替としてますます有力な選択肢となるでしょう。その性能と限界を評価し、システムの目標や目的に照らし合わせることで、用途に最適な選択肢を決定するのに役立ちます。
数十年にわたり、油圧シリンダーは高負荷用途において唯一実用的な技術でした。油圧システムは頑丈で比較的簡単に導入でき、さらに単位力あたりのコストも低く抑えられます。油圧シリンダーが長年にわたり、高負荷用途において唯一の実用的な技術であったのも不思議ではありません。事実上直線的に移動させる必要のあるほぼすべての重量物を、高速でも低速でも、上下どちらでも、動力源として選択できます。金属プレス、コンベアベルト、クレーン、のこぎりなど、その他多くの用途に使用できます。
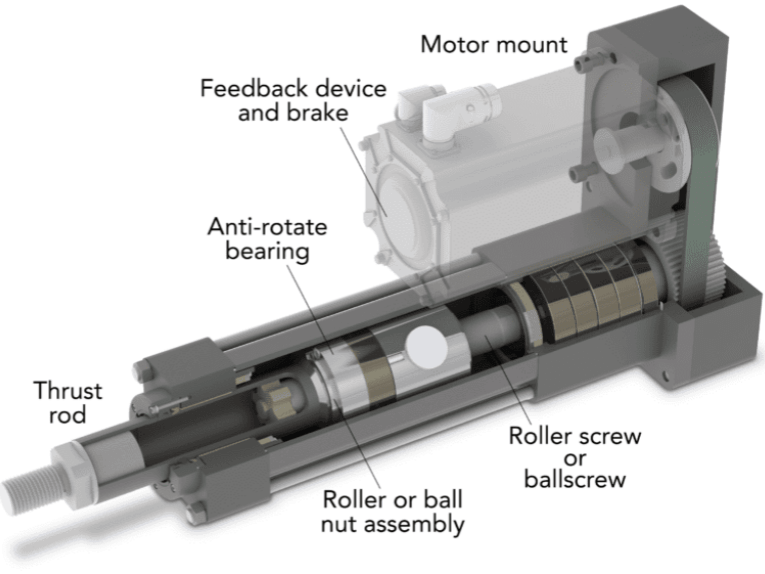
電動ロッドアクチュエータ(電動シリンダーとも呼ばれる)は、油圧式アクチュエータに代わる最新のモーションテクノロジーです。電動アクチュエータは、油圧式アクチュエータに比べて柔軟性、精度、信頼性が高く、さらに大きな力を発揮できる能力も向上し続けています。
油圧システムに対する電気システムの利点を理解することで、用途に最適なシステムを選択するのに役立ちます。さらに、油圧システムから電気駆動システムへの移行を成功させるための重要なヒントをいくつか理解しておくことも重要です。
油圧:いくつかの欠点を持つ旧来の技術
オペレーターは油圧機械を正常に稼働させる方法を熟知しています。しかし、課題や欠点も存在します。油圧システムの場合、漏れや故障が発生するかどうかではなく、いつ発生するかが問題です。清掃作業は手間がかかり、時間も要します。生産部品や製品を廃棄しなければならない場合もあります。また、油圧システムはコンプレッサーに比較的大きな設置面積が必要で、定期的なメンテナンスや手動による切り替えも必要です。さらに、油圧システムは騒音が大きく、温度変化の影響を受けやすく、正確な多位置制御機能がなく、オープンループ制御のため、機械制御で使用するデータ収集が複雑になります。
動作制御を向上させるための電動アクチュエータ
エンジニアが油圧シリンダーシステムよりも電動アクチュエータシステムを選択する主な理由は、そのモーションコントロール機能の柔軟性にある。
1. 位置制御 - 複数の位置を正確に制御
2. 速度制御
3. 加速および減速の制御
4. 出力力の精密制御
5. これらすべての動作変数を、高度なリアルタイム制御で制御する。
電動アクチュエータは、サーボドライブおよびモーターシステムと組み合わせることで、位置を無限に制御することが可能になり、その精度と再現性は油圧システムをはるかに凌駕します。
標準的な油圧システムは、端から端までの位置決め用途には優れていますが、これらのシリンダーを使用した中間ストローク位置決めはより複雑で、制御弁とオペレーターの補助が必要となります。中間ストローク位置決めはオープンループ制御であり、どの位置が許容できるかをオペレーターが判断する必要があります。さらに、速度制御は制御弁を介して監視され、ここでもオペレーターが用途に応じた許容速度を設定する必要がありますが、正確な速度設定に到達するのはしばしば困難です。
速度設定が調整されると、油圧シリンダから必要な圧力出力は圧力弁によって調整されます。ここでも、通常はオペレーターが目標圧力をダイヤルで設定する必要があります。さらに、油圧シリンダの位置、速度、および力の再現性は、シールの摩耗、漏れ、圧力低下、ポンプによるスパイク、およびその他のメンテナンス関連要因によって低下します。油質と粘度が温度によって変動する生産環境では、日々、月々(ましてや年々)の再現性のある性能を得ることは困難です。したがって、目標性能レベルを達成するには、オペレーターによる継続的な介入が必要となります。
サーボ級の速度制御は正確です
電動アクチュエータは、サーボ制御システムと組み合わせることで、さらに多くの利点を発揮します。複数の軸を制御できるサーボコントローラは、市販の部品として容易に入手可能です。コントローラと電動アクチュエータは、複雑な多軸構成においても、容易かつ費用対効果の高い方法で連携させることができます。1つまたは複数の電動アクチュエータの速度は、正確かつ連続的に制御され、停止したり目標位置をオーバーランしたりすることなく、速度を容易に切り替えることができます。
さらに、加減速のサーボ制御により、電動アクチュエータが急停止したり、急激に作動したりするのを防ぎます。これにより、機械フレームの要素にかかるストレスが軽減され、衝撃荷重に耐えるための構造の過剰設計も不要になります。すべての動作はスムーズになるため、機械の振動が許容できない、あるいはプロセス速度を制限する可能性があるミッションクリティカルなプロセスにおいて、電動アクチュエータは滑らかな動作を実現します。
サーボシステムでは、アクチュエータの出力力はサーボモータへの電流によって制御されます。サーボコントローラは電流を精密に制御できるため、ほぼすべての電動アクチュエータは、作業点における出力力を正確かつ再現性高く制御できます。
電動アクチュエータのもう一つの重要な特徴は、すべての動作プロファイル変数をプログラム制御できることです。そのため、オペレーターの操作は、目標とする性能変数をPLCなどのコントローラのプログラミング環境に組み込むための初期設計時間のみで済みます。一度設定すれば、その動作は日ごと、月ごと、年ごとに繰り返されます。機器に搭載されたヒューマンマシンインターフェース(HMI)画面には、位置、速度、力、加速度、減速度がいつでも表示(および調整)できるため、機械の柔軟性を最大限に高めることができます。
投稿日時:2026年5月27日