








Les systèmes hydrauliques offrent une longue durée de vie, mais leur rendement est inférieur à celui des systèmes électriques. Ces derniers assurent un contrôle précis de la position, de la vitesse et du régime moteur, tout en garantissant un fonctionnement plus efficace. Fonctionnant en circuit fermé pour une collecte de données simplifiée, ils ne nécessitent pratiquement aucun entretien.
En effet, à mesure que les actionneurs électriques à tige deviendront capables de fournir des forces comparables à celles des systèmes hydrauliques haut de gamme, ils constitueront des alternatives de plus en plus viables aux systèmes hydrauliques dans de nombreuses applications. L'évaluation de leurs capacités et de leurs limites, ainsi que leur adéquation aux objectifs du système, permettra de déterminer le choix le plus approprié.
Pendant des décennies, les vérins hydrauliques ont été la seule technologie viable pour les applications nécessitant une force importante. L'hydraulique est robuste et relativement simple à mettre en œuvre, tout en offrant un coût par unité de force inférieur. Il n'est donc pas surprenant que les vérins hydrauliques aient été la solution privilégiée.de factoSolution idéale pour alimenter pratiquement tous les objets lourds qui doivent être déplacés en ligne droite, que ce soit rapidement ou lentement, vers le haut ou vers le bas… y compris les presses à métaux, les convoyeurs, les grues, les scies et bien d’autres.
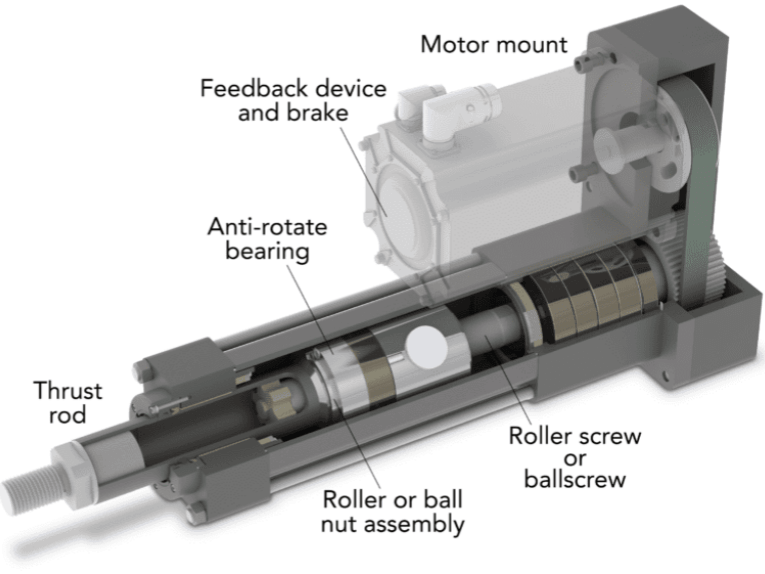
Les actionneurs à tige électrique (parfois appelés vérins électriques) constituent la technologie de mouvement la plus récente et offrent une alternative à l'hydraulique. Les actionneurs électriques sont comparativement plus flexibles, précis et fiables, et leurs capacités de force sont toujours plus importantes.
Comprendre les avantages des systèmes électriques par rapport aux systèmes hydrauliques vous aidera à choisir la solution la plus adaptée à votre application. De plus, quelques conseils de conversion vous garantiront une transition réussie d'une application hydraulique à une application électrique.
L'hydraulique : une technologie ancienne présentant certains inconvénients
Les opérateurs savent comment maintenir leurs machines hydrauliques en état de marche. Cependant, des défis et des inconvénients subsistent. Avec les systèmes hydrauliques, les fuites et les pannes sont inévitables. Le nettoyage est fastidieux et salissant. Il est possible que des pièces ou des produits finis doivent être mis au rebut. De plus, les systèmes hydrauliques nécessitent un espace relativement important pour le compresseur, ainsi qu'un entretien régulier et des changements manuels. Enfin, ils sont bruyants, sensibles aux variations de température, ne permettent pas un positionnement précis sur plusieurs positions et fonctionnent en boucle ouverte, ce qui complique la collecte de données pour les commandes machine.
Actionneurs électriques pour une meilleure commande de mouvement
La principale raison pour laquelle les ingénieurs choisissent un système d'actionneur électrique plutôt qu'un système de vérin hydraulique est la flexibilité de ses capacités de contrôle de mouvement :
1. Contrôle de position — vers plusieurs positions avec précision
2. Contrôle de la vitesse
3. Contrôle de l'accélération et de la décélération
4. Contrôle précis de la force de sortie
5. Contrôle sophistiqué et en temps réel de toutes ces variables de mouvement.
Les actionneurs électriques, associés à un servomoteur et à un système de moteur, permettent un contrôle infini de la position… et leur précision et leur répétabilité dépassent de loin celles des systèmes hydrauliques.
Les systèmes hydrauliques standards excellent dans les applications de positionnement d'extrémité à extrémité, mais le positionnement en milieu de course avec ces vérins est plus complexe et nécessite une vanne de régulation et l'intervention d'un opérateur. Le positionnement en milieu de course est en boucle ouverte et exige que l'opérateur détermine la position acceptable. De plus, la vitesse est contrôlée par une vanne de régulation et nécessite également que l'opérateur règle la vitesse appropriée pour l'application… bien qu'atteindre un réglage précis soit souvent difficile.
Une fois la vitesse réglée, la force de pression nécessaire au vérin hydraulique est régulée par le distributeur. Là encore, l'opérateur doit généralement ajuster la force cible. De plus, la répétabilité de la position, de la vitesse et de la force d'un vérin hydraulique est affectée par l'usure des joints, les fuites, les chutes de pression et les variations de pression dues à la pompe, ainsi que par d'autres facteurs liés à la maintenance. Il est difficile d'obtenir des performances constantes au quotidien, au mois le mois (et encore moins à l'année). Dans les environnements de production où la qualité et la viscosité de l'huile fluctuent avec la température, il est difficile d'atteindre le niveau de performance cible. Par conséquent, l'obtention de ce niveau de performance nécessite une intervention constante de l'opérateur.
La commande de vitesse de type servo est précise
Les actionneurs électriques présentent encore plus d'avantages lorsqu'ils sont associés à des systèmes de servocommande. Les servocontrôleurs capables de gérer plusieurs axes sont des composants disponibles sur étagère. Les contrôleurs et les actionneurs électriques peuvent être facilement (et à moindre coût) coordonnés dans des configurations multi-axes complexes. La vitesse d'un ou plusieurs actionneurs électriques est contrôlée avec précision et en continu, et peut passer d'une vitesse à une autre sans interruption ni dépassement des positions cibles.
De plus, la commande servo de l'accélération et de la décélération empêche les actionneurs électriques de heurter des butées brutales ou de se mettre en marche à l'arrachement. Ceci élimine les contraintes sur les éléments de la structure de la machine et la nécessité de surdimensionner les structures pour résister aux chocs. Tous les mouvements seront fluides, permettant ainsi aux actionneurs électriques d'assurer un fonctionnement régulier des processus critiques où les vibrations de la machine sont inacceptables ou pourraient limiter la vitesse de production.
Dans les systèmes servo, la force de sortie de l'actionneur est contrôlée par le courant alimentant le servomoteur. Grâce à la précision du contrôle du courant offert par les servocontrôleurs, la quasi-totalité des actionneurs électriques permettent un contrôle précis et reproductible de la force de sortie au point de travail.
Une autre caractéristique importante des actionneurs électriques est leur capacité à programmer l'ensemble des variables du profil de mouvement. De ce fait, la seule intervention de l'opérateur requise se limite à la conception initiale (ou interface utilisateur) pour intégrer les paramètres de performance cibles dans l'environnement de programmation d'un automate programmable ou autre contrôleur. Une fois paramétrés, les actionneurs fonctionnent de manière répétitive, jour après jour, mois après mois et année après année. Les interfaces homme-machine (IHM) des équipements permettent d'afficher (et de régler) à tout moment la position, la vitesse, la force, l'accélération et la décélération, pour une flexibilité maximale de la machine.
Date de publication : 27 mai 2026