








La lógica básica de los cilindros eléctricos consiste en realizar trabajo útil mediante la conversión del movimiento rotatorio (circular) de un elemento motriz en movimiento lineal (recto). Los modelos de cilindros eléctricos varían según el tipo de motor que proporciona el movimiento rotatorio, el tipo de eje helicoidal que proporciona el movimiento lineal y los tipos de conexión que permiten combinar estos dos componentes.
Los cilindros eléctricos se comparan frecuentemente con los neumáticos debido a sus áreas de aplicación. Esta comparación también puede hacerse con los cilindros hidráulicos. Los tres sistemas presentan ventajas y desventajas según sus características. Los usuarios deben considerar estos aspectos al elegir los productos para su aplicación. Los actuadores eléctricos se utilizan en la fabricación de maquinaria, la industria automotriz y sus subindustrias, la industria alimentaria, textil, de embalaje y empaquetado, dispositivos médicos, dispositivos de prueba, robótica y aplicaciones electrónicas. Los cilindros eléctricos se distinguen de otros sistemas por su estructura mecánica. El movimiento se produce mediante un eje helicoidal alojado en un cuerpo. El husillo de bolas permite la transmisión de potencia al convertir el movimiento circular que recibe del motor en movimiento lineal. Dependiendo de los componentes mecánicos utilizados en los cilindros eléctricos y del tipo de motor, se ofrece alta precisión de posicionamiento, control de velocidad y control de fuerza.
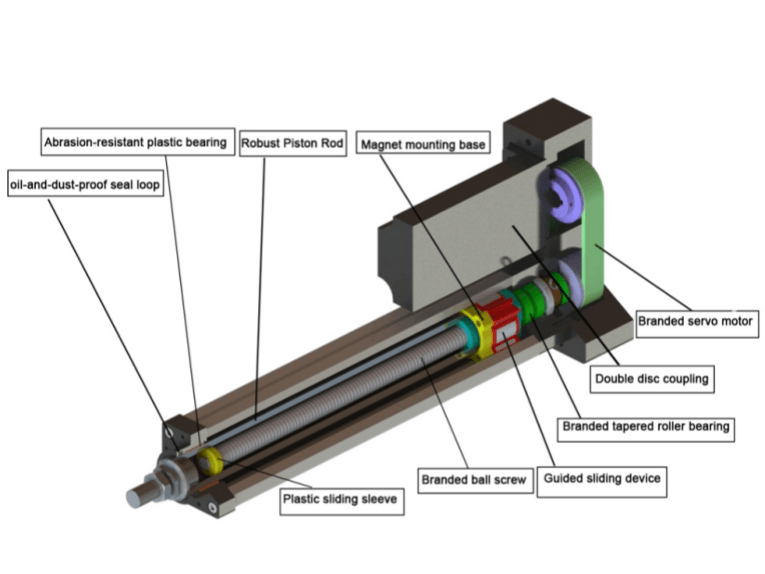
Estructura de cilindro eléctrico
La estructura del cilindro eléctrico consta básicamente de 3 elementos principales. Si bien la parte del cilindro se puede evaluar por separado, el motor generalmente se considera integrado.
1. Cilindro
El cilindro es el elemento que realiza el trabajo al convertir el movimiento circular que recibe del motor en movimiento lineal. Dependiendo de los productos mecánicos utilizados, la capacidad de carga máxima, la precisión de posicionamiento, la velocidad máxima y la longitud máxima de carrera del cilindro varían.
2. Adaptador de conexión del motor
Este es el mecanismo que transmite el movimiento del motor al cilindro. Se encuentra conectado entre el cilindro y el motor. Según la aplicación, el motor puede montarse axialmente o en paralelo al cilindro.
3. Motor
El motor es la principal fuente de energía del cilindro. Le proporciona el movimiento. Los cilindros eléctricos pueden utilizarse con integración de servomotores, motores paso a paso, motores de CC y motores de CA.
La fuerza aplicada por un cilindro eléctrico con servomotor integrado se puede controlar sin necesidad de equipos externos. Con un cilindro eléctrico equipado con servomotor, se puede lograr un posicionamiento de alta precisión en múltiples posiciones. Se puede obtener información sobre el posicionamiento realizado. La velocidad y la aceleración del cilindro eléctrico se pueden modificar durante el proceso. Todas estas operaciones se pueden controlar mediante un PLC. Para otros tipos de generadores de movimiento, estas operaciones son posibles con la adición de equipos externos (sensor, escala lineal, etc.).
Características del cilindro eléctrico
1. Control de posición con cilindro eléctrico
Es posible lograr un posicionamiento preciso en múltiples posiciones con cilindros eléctricos. La precisión del posicionamiento del cilindro eléctrico depende de la precisión del husillo de bolas y del sensor de posición utilizado. El cilindro recorre el paso del husillo de bolas por cada revolución del motor. Al detenerse el movimiento, el cilindro queda posicionado. Al controlar el movimiento del husillo de bolas, el cilindro puede colocarse en la posición deseada.
Si bien se puede lograr una precisión de posicionamiento de 0,02 mm utilizando un husillo de bolas en cilindros eléctricos, este valor se mantiene en el orden de 0,1 mm con un husillo trapezoidal. La selección del elemento lector de posición (codificador, escala lineal, etc.) debe ser adecuada para los valores de precisión de posicionamiento deseados.
Con un cilindro eléctrico integrado con un servomotor, la información de posición se puede leer sin necesidad de elementos externos. Esta información se puede procesar y evaluar. El cilindro se posiciona en su segunda posición tras permanecer un tiempo en la primera. El número de posiciones no se limita a dos; se puede aumentar.
Si se utilizan cilindros eléctricos con motores que no disponen de un lector de posición interno, se requiere un equipo externo para el control de posición. El posicionamiento se puede realizar controlando el movimiento del cilindro con la información de posición recibida del equipo externo.
2. Control de velocidad con cilindro eléctrico
La velocidad del cilindro eléctrico depende del paso del husillo de bolas y de la velocidad del motor. La velocidad se puede controlar modificando el número de revoluciones del husillo de bolas. También se puede modificar la velocidad del motor durante el movimiento. Las pérdidas de tiempo se pueden eliminar ajustando las aceleraciones según la aplicación. Si bien el cilindro se mueve a menor velocidad para alcanzar su primera posición, después de un cierto tiempo acelera para alcanzar su segunda posición.
3. Control de aceleración del cilindro eléctrico
Al modificar los valores de aceleración y desaceleración del motor integrado en el cilindro eléctrico, se puede controlar la aceleración del cilindro. Esto evita arranques y paradas bruscas bajo cargas pesadas. En aplicaciones que requieren ciclos de funcionamiento rápidos, se pueden lograr los tiempos de ciclo deseados ajustando los arranques y paradas rápidas. El cilindro alcanza una velocidad determinada con diferentes valores de aceleración.
4. Control de fuerza con cilindro eléctrico
La fuerza que ejerce el cilindro eléctrico depende de la potencia del motor y de la estructura mecánica del cilindro. Esta fuerza se puede controlar regulando la potencia del motor. Actualmente, se obtienen fuerzas de hasta 300 kN con cilindros eléctricos.
La fuerza se puede controlar mediante el modo de par del motor en el cilindro eléctrico con servomotor integrado. El cilindro se puede restringir mediante una fuerza determinada, manteniéndose constante bajo dicha fuerza. Se puede leer la información de fuerza y posición, la cual se puede procesar y evaluar. Dependiendo de la sensibilidad deseada en la información de fuerza, puede ser necesario utilizar un sensor de fuerza. Esta información se puede obtener utilizando el sensor de fuerza cuando el motor se usa sin el modo de par en el cilindro eléctrico.
Los cilindros eléctricos son uno de los frutos del desarrollo de la alta tecnología y la Cuarta Revolución Industrial. El uso generalizado de sistemas inteligentes con altos ciclos de producción, que permiten fabricar diferentes productos en la misma máquina, y los bajos costos operativos, incrementan la demanda de cilindros eléctricos. Se prevé que estos productos se impondrán con el tiempo, ya que ofrecen numerosas ventajas en comparación con los cilindros que funcionan con energía hidráulica. Los cilindros eléctricos están separados de otros sistemas y poseen una estructura mecánica. El movimiento se genera mediante un eje helicoidal alojado en un cuerpo. El husillo de bolas permite la transmisión de potencia al convertir el movimiento circular que recibe del motor en movimiento lineal. Dependiendo de los componentes mecánicos utilizados en los cilindros eléctricos y del tipo de motor, se proporciona alta precisión de posicionamiento, control de velocidad y control de fuerza. Los cilindros eléctricos son productos respetuosos con el medio ambiente, además de los beneficios que ofrecen al usuario. En términos de eficiencia energética, una de nuestras mayores responsabilidades actuales, los cilindros eléctricos son muy sensibles en comparación con otros sistemas. Tras 2000 horas de pruebas en las mismas condiciones, carga y velocidad, se comprobó que el cilindro eléctrico era 11 veces más eficiente en términos de consumo de energía que el cilindro neumático.
Fecha de publicación: 18 de mayo de 2026